锂离子电池管理芯片的研究及其低功耗设计 — 锂离子电池管理芯片的功能设计及功耗优化(二)
从上面的分析可以看出:首先,功耗优化是基于性能约束条件下的功耗优化,反之也成立;其次,一个有效的功耗管理方案取决于系统和负载的特性。目前,已有的DPM技术和优化策略可以分为非适应性和适应性的两大类。其中,非适应性的DPM技术以基于Timeout策略的为代表,而后者以基于预估算策略、随机控制策略的为代表。
1)Timeout策略
DPM判决策略中,Timeout策略是空闲状态在等待一段时t timeout后关闭。其算法表述如下:
Timeout PM ()
{
Begin
Initiate ttimeout
If tidle > ttimeout then shutdown
Stay in sleep until request!=0
End
}
Timeout策略中,假定Pr是退出低功耗状态所消耗的功率,tr是相应延迟,则E r =Prtr是退出低功耗的能量,Pi是处于空闲状态时的功率,则定义一个空闲等待时间阈值ttimeout
显然,当等待时间超过阈值时,进入低功耗状态能节约更多的能量。该策略的思路比较简单,当进入空闲的同时开始计时,在阈值时间ttimeout之前不关闭,到达阈值后才关闭PMC进入低功耗状态,直到接收到外界输入的任务后再返回工作状态。
由此看出,Timeout策略有比较鲜明的特点:首先,时间阈值ttimeout非常重要,合理的设置阈值将显著提高关断的正确性,假设的可信度甚至可达95%.此外,和基于预测和基于随机控制的策略相比,Timeout策略的应用相对简单。基于预测的策略是通过学习任务的分布,在输入特性和系统性能的基础上动态地改变阈值,即是通过预测来消除负载的不确定性。基于预测的策略中,如果参数较多,则将增大调整的难度,而且它不能很好地控制系统性能的损失。基于随机控制的策略是将PM看作是一系列随机最优化问题,所涉及的系统一般有多种功耗状态而不仅仅两种状态的转换。在较为复杂的多媒体、无信通信领域,上述两种策略虽然增加了系统的软硬件或性能的代价,但是和节省的功耗相比还是值得的。但在单芯片系统中,受成本和性能的限制,由于Timeout策略比较容易实现,用内部PM实现时所增加的软硬件负担相对不大,而且功耗节省明显,因此比较受到重视。本文研究的电池管理芯片是一个实时系统,保护功能的实现依赖于对供电电池状态的检测,采用基于Timeout的策略进行功耗管理,从成本、代价以及可行性方面,都是一个比较好的选择。
但是,Timeout策略有以下缺点:一是关断与否与负载的性质和状态无关,而仅仅根据任务请求来决定,这显然不能满足锂离子电池管理芯片的应用要求;二是在等待激发Timeout策略的过程中,仍然有较大的功率消耗,如果能采用预关断策略,即在系统已经历的时间和负载性质确定的基础上,在等待开始时就关闭,这样就可以节省等待期间的功耗。针对上述Timeout策略的缺点,本文提出了一种基于负载驱动的预关断Timeout策略。
2)基于负载驱动的预关断Timeout策略
一般地,根据负载性质,假定PMC有L种功耗状态,其中L是对应完全工作状态,1,…,L-1是不同的睡眠状态,则Pl(l=1,…,L-1)是对应不同状态的功耗,从l(l=1,…,L)到m(m=1,…,L,m≠l)不同状态之间转换将有能量和延迟的代价,分别是功耗Ptl,m和延迟tl,m 。为分析简便,在状态变化为从l(l=2,…,L)到m(m﹤1),功耗和延迟都很低,可以忽略不计。
再定义一个参数Zl(l=1,…,L-1),它是为了获得正的能量必须维持在l状态的时间,则有
式中,等式左项代表的是维持在l状态比在l+1状态时,能够节省的能量值,右项表示从l到L以及l+1到L的状态转变间的差值,因此有
前面已提出,结合应用要求和功耗管理成本,规定电池管理芯片的PMC,只有两种功耗状态,因此有L=2,其中l=1代表关状态,l=2代表开状态。当l=1时,式(3.3.3)变为
可以用式(3.3.4)描述常规的Timeout策略:当空闲时间t idle比空闲等待时间阈值t 1长时,此策略便假定,在t 1 +Z 1时间段内仍有可能保持空闲,此时关断显然可以节省功耗。而事实上,在能够检测到负载特性的基础上,对于可以处于空闲状态而不影响输出状态的部分电路,只要满足tidle> Z1,就可以在空闲等待开始便被关断。
可以从负载、器件和功耗状态的角度,分析比较常见的Timeout策略和基于负载驱动的预关断Timeout策略,结果如图3.3.4所示。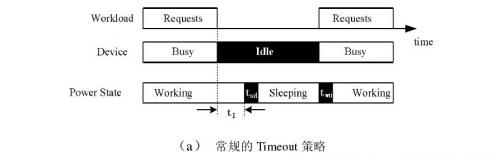
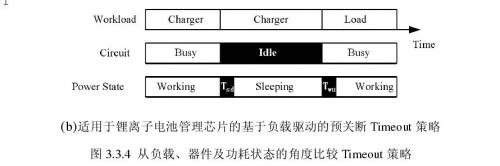
图3.3.4(a)中,t 1为等待阈值时间值,Tsd和Twu是状态转变对应的延迟,功耗状态的转换只是根据任务请求;图3.3.4(b)所示的Timeout策略中,功耗状态的转换是基于负载性质和电路状态的判别,所以可以在等待开始时就关断相应电路,此时系统代价仅是功耗转换之间的延迟。显然,和常规策略相比,基于负载驱动的预关断Timeout策略可以节省更多的功耗。
4 DPM技术实现框图如前所述,假设电池管理芯片的PMC具有两种功耗状态,系统的PSM就可以如图3.3.5所示。系统有三种功耗状态:一是所有功能模块都正常工作的状态,所消耗功率为正常(Normal),二是根据负载特性动态地关闭部分功耗较大的功能模块,即较低功耗状态(Partly Shutdown)最后是将系统电源及时切断,最低功耗状态也就是Power Down模式。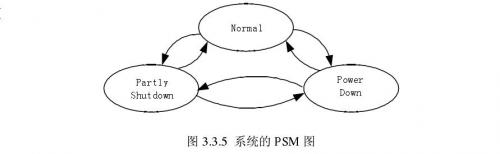
为了实现图3.3.5所示的系统PSM,在原系统框架的基础上,本文设计了一个内部PM,并且采用基于负载的预关断Timeout功耗管理策略优化功耗,如图3.3.6所示。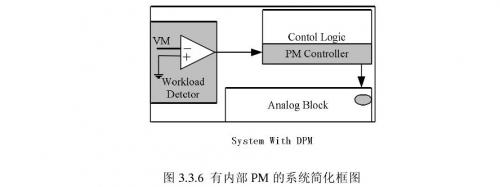
从外部和内部PM的分析比较可以看出,在能够准确地检测出负载性质和系统状态的前提下,锂离子电池管理芯片采用内部PM,将能够以较小的硬件代价实现快速、灵活的动态功耗管理。图3.3.6中的PM由负载检测电路、PM控制器组成。其中,控制器是一个状态机,为了尽量减小系统PM控制电路的代价,将其置于系统原有的逻辑电路中,这样也能保证不影响系统其它功能。
PM具体的工作过程如下:利用检测充放电电流的VM端,设计一个比较器,根据VM端电压极性来判断所接负载特性,内部功耗控制逻辑电路接收比较器输出信号后,则输出相应的控制信号,然后将此时系统中电流消耗较大,但又可以处于空闲状态的模拟电路关断。在内部PM中,所有模拟电路的关断都可以由一个MOS开关管控制,DPM信号由控制器输出,控制开关管的导通,从而在需要时能切断电路与电源或到地的通路。
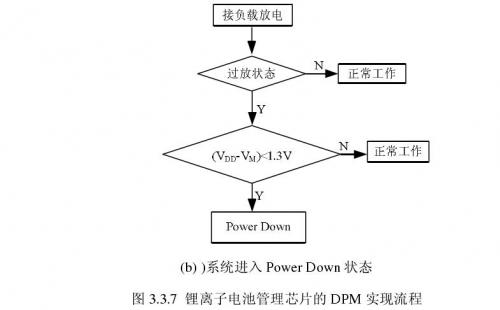
锂离子电池管理芯片的DPM工作流程见图3.3.7.在图3.3.7(a)中,利用系统检测模块实时监测负载,并判断负载是放电负载还是充电器。接负载放电时,如果电池处于过充电状态,则不启动DPM,所有功能模块都正常工作;如果电池不是过充电,则将充电电压取样电路关闭,换句话说,此时系统将对过充电状态的实时检测以节省功耗:如果所接的是充电器,则同样需要预先判断是否过放,是过放状态则不启动DPM,否则将过放电电压取样电路关闭,此时系统不再认为电池还会处于过放状态。图3.3.7(b)则是利用电池在过放状态下,根据VM与VDD间的压降决定是否进入Power Down状态,即关闭系统电源以维持极低的电流消耗。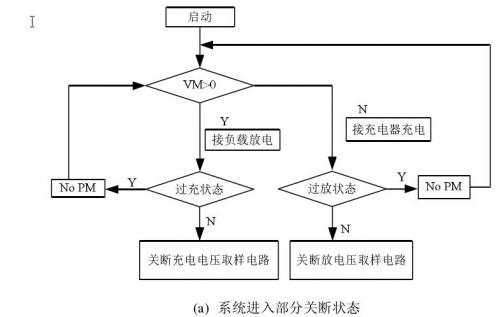
- 锂离子电池管理芯片的研究及其低功耗设计 — 锂离子电池管理芯片的功能设计及功耗优化(06-04)
- 锂离子电池管理芯片的研究及其低功耗设计-----结论与展望(06-04)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)