stm8s开发(七) SPI的使用:SPI主机通信!
科普SPI:是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,分别是:SCK(时钟)、MOSI(主机发送数据)、MISO(主机接收数据)、NSS(片选),其中NSS的片选信号,大部分情况下我们使用的是软件NSS,即为使用一个GPIO进行软件控制片选。值得注意的是,其中SPI有4中模式:分别是空闲时SCLK的电平高\低、MISO采样时第1\2个变化沿。
stm8s的SPI结构如下图,

如果用形象的比喻的话:SCK像一个发条齿轮,只有当发条齿轮转动的时候(SCK输出8个时钟),MOSI才能将1Byte的数据发送出去,同时,MISO将1Byte的数据接收回来。
使用SPI无非就一个初始化,一个数据发送/接收,两大功能。
初始化分初始化为主机、从机,不过一般和外部芯片通信单片机都是作为主机
//******************************************************************
//函数名: SPI_Master_Conf
//功能: 硬件SPI主设备初始化
//输入参数:无
//返回值: 无
//******************************************************************
void SPI_Master_Conf(void)
{
CLK_PCKENR1 |= 0x02; //打开SPI时钟
/*PC6、PC5设置为输出,最大10MHz*/
PC_DDR |= 0x60;
PC_CR1 |= 0x60;
PC_CR2 |= 0x60;
SPI_CR1 = 0x04;
SPI_CR2 = 0x03;
SPI_CR1|= 0x40;
/*
SPI_CR1_SPE = 0; //禁止SPI
SPI_CR1_LSBFIRST = 0; //先发送MSB
SPI_CR1_BR = 0; //波特率设为 fbus 16MHz
SPI_CR1_MSTR = 1; //主模式
SPI_CR1_CPOL = 1; //空闲状态时SCK为高电平
SPI_CR1_CPHA = 1; //数据从第二个时钟边沿开始采样
SPI_CR2_BDM = 0; //双线单向模式
SPI_CR2_SSM = 1; //使能软件从设备管理
SPI_CR2_SSI = 1; //内部从设备选择为主模式
SPI_CR1_SPE = 1; //使能SPI
*/
}
//******************************************************************
//函数名: SPI_Slave_Conf
//功能: 硬件SPI从设备初始化
//输入参数:无
//返回值: 无
//******************************************************************
void SPI_Slave_Conf(void)
{
// SPI_CR1_LSBFIRST = 0; //先发送MSB
// SPI_CR1_SPE = 0; //禁止SPI
SPI_CR1_BR = 3; //波特率设为 fbus/16 1MHz
SPI_CR1_MSTR = 0; //从模式
SPI_CR1_CPOL = 1; //空闲状态时SCK为高电平
SPI_CR1_CPHA = 1; //数据从第二个时钟边沿开始采样
// SPI_CR2_BDM = 0; //双线单向模式
SPI_CR2_SSM = 1; //使能软件从设备管理
SPI_CR2_SSI = 1; //内部从设备选择为从模式
SPI_ICR_RXIE = 1; //开启接收中断
SPI_CR1_SPE = 1; //使能SPI
}
发送方式一般有两种:阻塞轮训 和 中断 注意:发送的同时也在接收
//******************************************************************
//函数名: SPI_WriteByte
//功能: 硬件SPI读写一个字节数据
//输入参数:byte:数据
//返回值: 无
//******************************************************************
u8 SPI_WriteByte(u8 byte)
{
while(SPI_SR_TXE==0);
SPI_DR = byte;
while(SPI_SR_RXNE==0);
return SPI_DR;
}
#pragma vector=SPI_RXNE_vector
__interrupt void SPI_RXNE_IRQHandler(void)
{
RxBuf[cnt++]=SPI_DR;
}
这里的 #pragma vector=SPI_RXNE_vector 是IAR工程的中断函数入口地址。 SPI_DR为接收到的数据(其实就是寄存器的值)
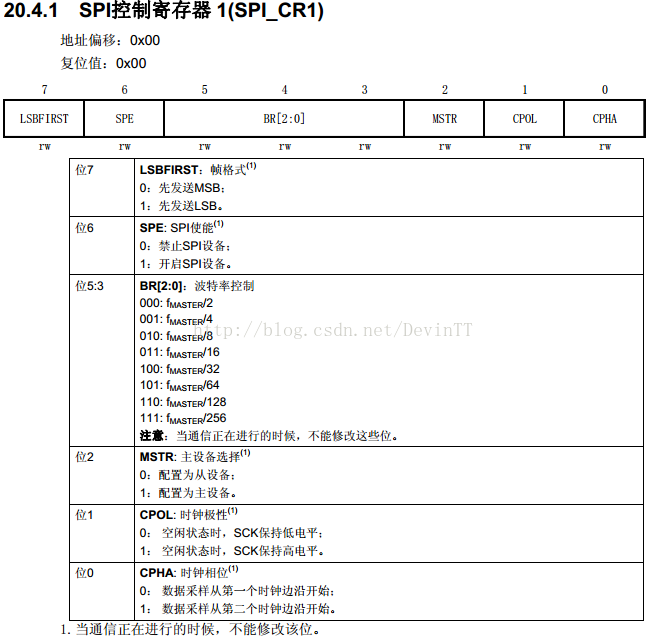
这里给出的代码使用的是SPI的其中一个MODE,实际使用的话还需要结合外部芯片的SPI的MODE是哪个,通过修改配置 SPI控制器 SPI_CR1 (这个寄存器主要是修改SPI通信配置的)。
最后需要验证SPI初始化、通信成功了没,你只需要将MOSI和MISO(也就是PC5和PC6)短接在一起,发什么,接什么,也就是:u8 temp = SPI_WriteByte(0x5A); 如果通信成功的话,temp就是0x5A了。
附上stm8s在IAR环境下的项目工程,包括了SPI、IIC、PWM、AWU、USART
- stm8s开发(六) EXIT的使用:做一个外部中断的按钮!(09-18)
- stm8s开发(五) TIMER的使用:定时!(09-18)
- stm8s开发(八) IIC的使用:IIC主机通信!(09-19)
- stm8s开发(四) CLOCK的使用:时钟控制!(09-14)
- stm8s开发(三) UART的使用:串口通信!(09-14)
- stm8s开发(二) GPIO的使用:点亮LED!(09-13)