基于嵌入式系统智能手环的设计开发
1.设计目的
随着科技的进步,智能化成为了人们关注的焦点,同时也越来越贴近人们的生活。人们对于健康生活方式的需求催生出了智能可穿戴设备,智能手环就属于其中的一种代表性产物。其主要应用于监测运动,监测睡眠以及智能化的安排人的生活作息方式等。是一款突出个性与人性的智能化产物。本文讲述一套初步的智能手环解决方案,对于智能手环的设计以及制造有可行性方案指导作用。
2.用户需求
智能手环是一种穿戴式智能设备。通过这款手环,用户可以记录日常生活中的锻炼、睡眠、部分还有饮食等实时数据,并将这些数据与手机、平板、ipod touch同步,起到通过数据指导健康生活的作用。

图一 智能手环样图
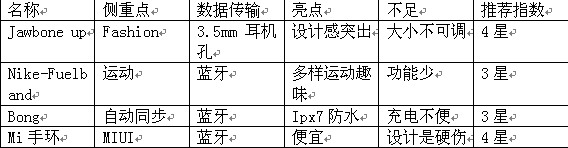
表一 热门智能手环对比
智能手环内置低功耗蓝牙4.0模块,可以与手机、平板、PC客户端进行连接,可以随时随地设置身高、体重、步幅等信息和上传运动数据。另外,智能手环还具备社交网络分享功能,比如用户可以将睡眠质量、饮食情况和锻炼情况以及心情记录等通过绑定微博等社交网络端进行分享。
3.性能指标
3.1MCU和蓝牙模块
nRF51822是一款为超低功耗无线应用(ULP wirelessapplications)设计的的多协议单芯片解决方案。芯片支持BLE4.0和2.4GHZ协议栈,整合了射频发射电路,一个ARM Cortex M0核以及256KB的flash + 16KB的RAM。
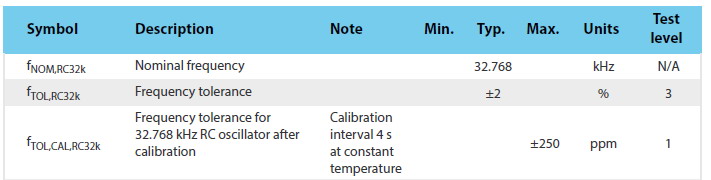
图二 nRF51822性能参数
nRF51822性能优点:
(1)内部RC振荡器的误差是2%(30分钟/天),即使校准后只能达到250ppm(22秒/天);
(2)外部晶振,一般能达到40ppm(3秒/天),误差非常小;
蓝牙BALUN可以使用分立器件,也可以使用ST定制的BAL-01D3。设计中我们使用了定制器件BAL-01D3,保证了信号的性能以及减小了的板卡尺寸。注意:如果更改nRF51822的封装,需要将定制器件型号改成BAL-02D3。
BALUN电路输出端,需要一个π形电路(起到阻抗匹配的作用),需要根据实际情况在三个位置上增加电容或者电感。调整的依据是根据史密斯圆图(如下图所示),把阻抗调整到中心点,达到最大的功率输出效果。
4.过程描述
智能手环功能实现流程图:
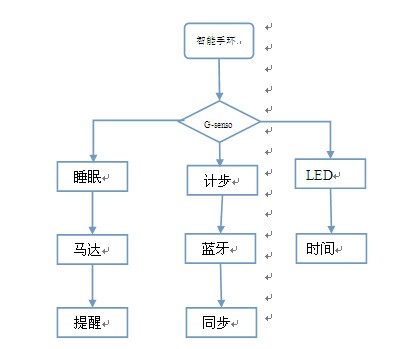
图三 智能手环功能实现流程图
5.系统结构
智能手环是由数据连接模块运动传感器
三轴加速度传感器
电池(可充电或纽扣电池)
闪存芯片
蓝牙通讯模块
震动马达
指示灯或显示屏幕(有些可能没有)
NFC(目前只看见 Fitbit Flex有)
核心部件是:蓝牙传感器,ActiGraph体动记录仪等组成。其结构组成图如下:
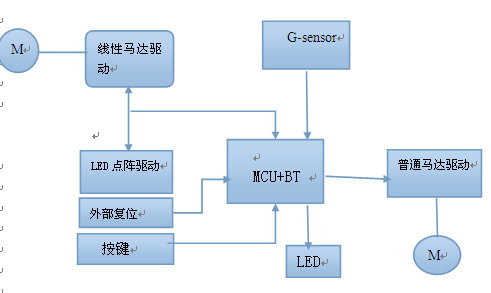
图四 智能手环结构图
6.系统任务关联
6.1 G-sensor工作原理
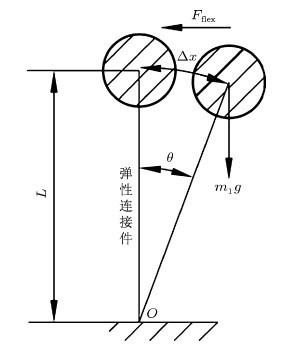
重力传感器是将运动或重力转换为电信号的传感器,主要用于倾斜角、惯性力、冲击及震动等参数的测量。在测量平台倾斜角时,将重力传感器垂直放置于在所测平台上,重力传感器的敏感轴应与倾斜平台的轴向一致,在水平状态下应与水平面平行,如图五 所示,其 中α 为平台沿某一方向的倾斜角。重力传感器的质量块由于受到重力加速度g 在倾斜方向上的分量α 的作用产生偏移,使重力传感器的输出电压发生变化。若重力传感器在水平状态下的输出为0 V ,倾角为α 时的输出为α V ,且在1g 加速度作用下的输出 为V ,则有:
V0 =V / g ×sinα ×1g +V α
即:
α = arcsin[(Vα ?V0 ) /V ]
图五 G-sensor工作原理
系统任务关联流程图如下:
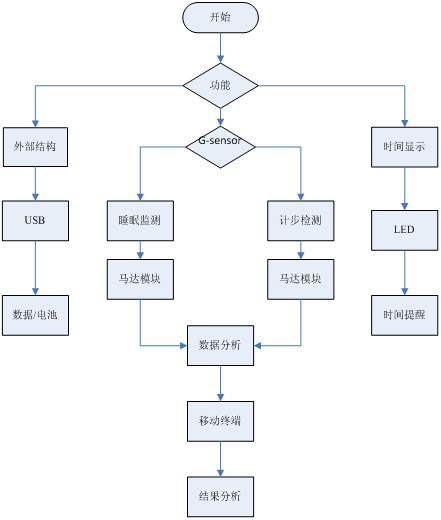
图六 系统任务关联流程图
6.2跑步和运动速度监测
运动检测主要采用三轴加速传感器来实现,这也是手环的最核心的组件之一,这个组件的作用是计步测量。简单来说,三轴加速器的工作原理是,当人在正常行走时其实会产生水平和垂直两个加速度,当用户迈步时,单脚着地重心上提,垂直方向呈向上加速度,而继续往前走重心回落,加速度方向。而在水平方向,则是迈步时向前加速,收脚是减小。当用户迈步时,单脚着地重心上提,垂直方向呈向上加速度,并向前加速。而手环中的三轴加速器,就是通过人体这样不同的加速度变化可以绘制出一条正弦曲线。以垂直方向加速度正弦波为例,从波谷到波峰再到波谷就是正常人一个步伐的过程,如此就可以推算出用户行进的步数。
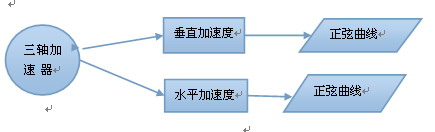
图七 运动检测实现原理
6.3睡眠监测
使用体动记录仪跟踪您的睡眠,监视您的微小运动,以确定您是处于清醒、浅度睡眠还是深度睡眠中。
睡眠深度一般是以身体活动减少和感觉灵敏度降
- Linux嵌入式系统开发平台选型探讨(11-09)
- 嵌入式系统中文输入法的设计(03-02)
- 基于MPC755的嵌入式计算机系统设计(05-10)
- WinCE下光电编码器的驱动程序设计(04-12)
- 为什么嵌入式开发人员要使用FPGA(05-13)
- VxWorks几种常用的延时方法介绍(05-16)