基于视觉图像的微小零件边缘检测算法研究
时间:08-25
来源:互联网
点击:
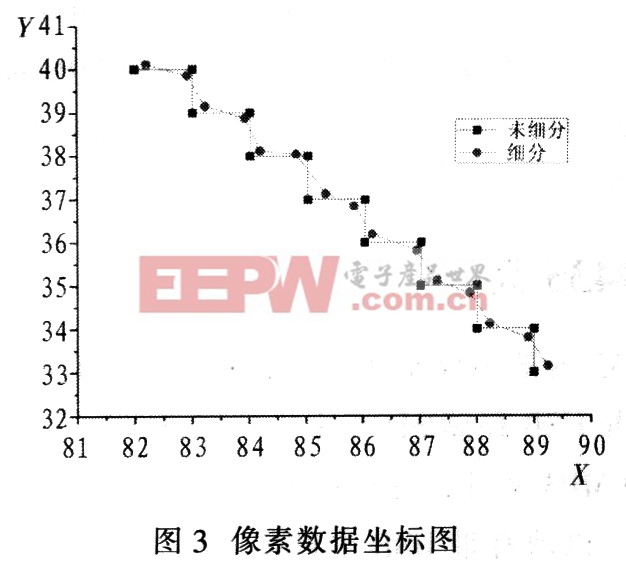
(3)计算标准偏差 以单个点的像素坐标值为标准坐标值,将定位后的单点与对应点的坐标差作为算法偏差,计算得到的标准偏差约0.20 pixel。
5 结论
采用的边缘检测算法是通过扩展的4个方向的Sobel算子引入衰减因子而得到无失真的灰阶边缘图,再采用Sobel算子细化,可使较陡边缘部分光滑连续,且接近单点宽的边缘;采用二次多项式插值法在梯度方向插值后得到光滑边缘,定位精度达到0.20 pixel,适于对精度要求较高的视觉系统。
- 从零开始Labview机器视觉-图像采集(01-06)
- 使用三坐标测量前的测头校正(02-27)
- 用杠杆百分表测量零件宽度(02-27)
- 阿贝折射仪的维护与保养(02-10)
- 快速而精确的激光测量技术(09-02)
- 典型零件叶片的加工工艺及问题(06-04)