A3000过程控制实验系统开发
A3000过程控制实验系统最具工程化特性,可以模拟各种工业现场。本文以工业多容系统中的PID控制为实例,分析单容液位系统、双容液位系统以及三容液位系统对多个容器串联后系统特性的影响,并通过多容液位系统控制实验进行验证。
1 研究的模型范围
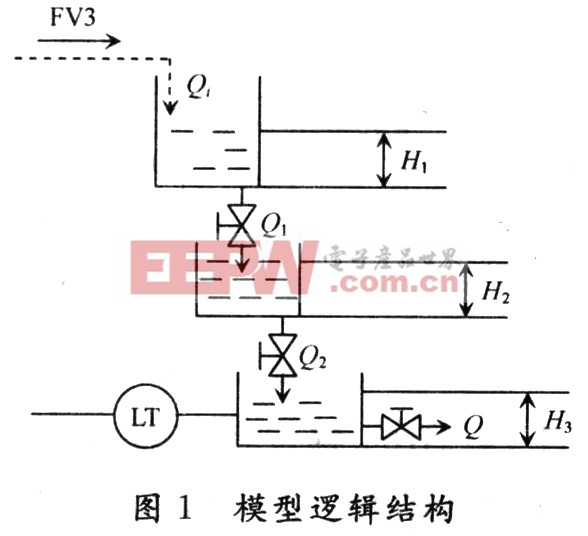
工业多容系统各种各样,实际情况比较复杂,有相互竖直连通的,有水平放置通过压力连通的,有大容器也有小容器,有的容器出口还不只一个。然而作为理论研究,应把问题限制在一种特殊的情况下,以便排除各种非关键因素的干扰,从而获得更为清晰的理论。如图1所示。三个容器在竖直方向相叠加,那么上一个出口流量不会受下一个容器液位的影响。实际上,真实的工业系统还有三个容器水平并排放置,那么高液位容器的出口流量就会受低液位容器液位的影响。
2 数学模型的建立与测定
2.1 系统模型的建立
由于三容系统液位数学模型具有高阶导数,比较复杂,使用直接的公式计算是困难的。这里通过对单容和双容准确模型的计算和分析,然后经验性的推理来解决工业中多容问题,包括三容。
下面按照类递推原理,建立单容、双容、三容系统的数学模型:

随着容器个数的增加,可以根据递推原理,推导出更加复杂的多容系统数学模型,但在这里不再做更多的推导。
2.2 系统模型的测定
不同系统水位阶跃响应曲线如图2~图4所示。
由于三容系统比较复杂,特别是当工业对象特性本身不是简单同样容器竖直叠加时,公式更加复杂,所以这里只给出一个简单的数学模型公式,目的在于通过单容、双容的模型测量,获得一个向多容积系统控制推导的经验方法。

3 多容系统的PID控制推导
单容实验时,利用数字模型调整PID值,分别在P=10,I=100 s,D=0 s时获得了比较好的结果。
双容实验时,利用数学模型调整PID值,分别在P=5,I=200 s,D=0 s时获得了比较好的结果。
对于这种二阶函数,系统稳定时间与其惯性时间有一定关系,而这个时间和PID的积分时间成一个等指数关系。随着容器的串联,导致时间成指数增加,肯定会比线性加倍的方式快,推出如下可能的经验公式:

式中:t为容器特性时间;K为与系统有关的比例系数。这样推出:两容串联,其PID积分时间TI=200 s,三容串联,其PID积分时间TI=400 s,四容串联,其TI=800 s。
式中:t为容器特性时间,K为与系统有关的比例系数。
这样推出:两容串联,其PID积分时间TI=270 s,三容串联,其PID积分时间TI=745 s,四容串联,其TI=2 030 s。
4 多容液位系统控制实验验证
4.1 实验验证及控制曲线
P=2.5,I=600 s,D=0 s,PID控制曲线如图5所示。

P=2.5,I=740 s,D=0 s,PID控制曲线如图6所示。

4.2 控制实验结果分析
从结果来看,推出的经验公式如下:
对于具有同样特性的多个容器,如果以竖直方向连通的方式串联,那么可以推导出如下控制方法。如果单容时最好的PID控制参数为P=P0,I=I0,那么对于多容系统,可以有参考的PID控制参数:

式中:n=1为单容系统,特例。对于n=2,n=3,本文进行了探讨。由于条件有限,没有对n超过3的情况进行验证,希望在以后的工作中能对其进行进一步的验证,使之能被应用于更多容器串联的系统。另外的情况是如果各个容器特性不一样,并且差异不是很大,则可以通过参数修正的方法进行修改。当然,也需要进行大量的验证。这里的结论只是希望能为加快参数选优的过程提供一个参考。
5 结 语
多容液位系统PID控制的研究首先对其建立数学模型,并对多容系统的PID控制进行推导,得出PID对应的最佳数值,最后在通过多容液位系统控制实验进行验证,分析结果可作为对加快参数选优过程的一个参考。
- HH52P型电磁继电器动态特性监测方法的研究(04-27)
- 通过转动试验测定麻花钻的过程力(02-27)
- “SPC统计分析”在自动影像测量仪中的应用(02-27)
- 三坐标测量机的测量过程(02-27)
- FAME解决方案安全掌控测量过程(02-06)
- 测量仪表流量需具备的要求-应用于过程控制(01-05)