CRSl0陀螺仪及其在角速率与转角测量中的应用
摘要:针对在转向控制过程中,需要得到运动对象运动的角速率与转角,设计了基于LMS8962 ARM微处理器与CRSl0高精度数字式陀螺仪的角速率与转角测量系统,描述了CRSl0的功能特点及使用方法,阐述了系统设计的原理,并给出了系统设计的硬件电路和软件设计流程。最后将其与Crossbow Technology公司的高精度IMUAHRS500GA-226航向参考系统测得的结果进行对比分析。实验结果为:角速率测量误差平均为0.55 0(°)/s,转角测量误差还比较大。平均误差为2.5°。测量精度有待进一步提高。
关键词:CRSl0;角速度测量;转角测量;LMS8962
微机电传感器(MEMS)惯性传感器在近几年来高速发展并得到了广泛的应用。微惯性传感器作为一种重要的MEMS,由微型陀螺仪、微型加速度计、专用集成电路(ASIC)、嵌入式微处理器及相应的软件组成,输出可以包含角速度、加速度、姿态等多种信息,并且其体积小、集成度高、使用方便,在军民等领域都得到广泛应用。
CRSl0是Silicon SENSING公司的一款高精度的MEMS单轴陀螺仪,它是数字式输出,输出传感器运动过程的角速度和传感器工作的环境温度。
在转角测量方面,传统的方法是使用角度传感器,测量起始时间的角度值,然后相比较得到转过的角度。在此,根据运动学原理,应用CRSl0陀螺仪,设计了一个角速度和转角测量系统,系统配置有数据输出接口和液晶显示界面。
1 CRS10功能介绍及使用
CRSl0是一款高精度的数字角速率陀螺仪,集成度高,较宽的工作温度(-40~80℃),高带宽和宽泛的频率范围,极低的角速率随机漂移,标准5 V电压供电,SPI数据输出和模拟端口输出2种输出方式满足各种应用不同需求。在CRSl0的默认配置是为75 Hz带宽,±375(°)/s角速率测量访问。用户可根据需要,设置其角速率测量范围和带宽。例如可设置±75(°)/s的测量范围,也可设置带宽5、10、25、40、50、60和100 Hz。
CRSl0采用23 mmxl7 mmxl0 mm封装。无论是垂直或可用水平支架可表面安装在PCB上。其体积小,集成度高,易于安装。可广泛应用于汽车偏航率测定、制导和控制、平台稳定、图像稳定、惯性测量装置、机器人和导航等领域。
1.1 CRSl0功能介绍
图1(a)和图l(b)分别是CRSl0的实物图和功能框图。由图l(b)可知,在CRSl0中,MEMS陀螺仪先感知外界信号,并将信号输出给数据采集专用集成电路,数据采集电路将处理后的信号输出给微控制器。微控制器将得到的数据结果存入输出寄存器。通过SPI总线,外部SPI主控器
件向CRSl0发送控制指令或者读取。CRSl0内部设置有控制寄存器,寄存器都有默认的值,通过对控制寄存器的修改写操作,可以改变角速率测量范围频率和输出带宽等方面的控制效果。
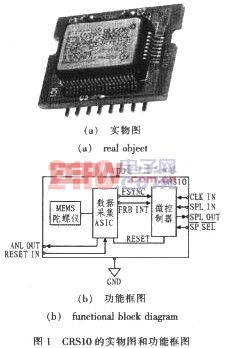
CRSl0测量的是平行于PCB平面的角速率。CLK_N,SPI_IN,SPI_OUT和引脚是传感器的SPI接口,引脚是传感器的复位引脚。A-NL_OUT是角速率的模拟输出端口。
CRSl0的数字输出部分还包含其工作环境的温度值。假如在无偿条件下,陀螺仪性能不佳,那么可通过使用这个温度进行建模和补偿。
1.2 CRS10使用方法
1.2.1 CRS1O硬件建接
CRSl0的SPI接口与各种微处理器SPI主控制器件接线如图2所示。SPI总线的时钟频率最高可达到2.5 MHz,建议采用1 MHz。

1.2.2 CRSl0数据读写与数据处理
通过SPI总线,可以对CRSl0进行读写操作。可以根据设计要求设置控制寄存器的值达到控制效果,也可以使用寄存器的默认设置。控制指令由1个字节状态位,4个字节的数据位和1个字节的校验位共6个字节组成。向CRSl0写控制指令时,只要将指令串通过SPI总线发送给CRSl0即可。
读取CRSl0输出的数据时,从总线上读取到的是6个字节的数据,依次是:1个字节的状态位,2个字节的角速率数据位,2个字节的温度数据位和1个字节的校验位。
角速率值(RATE_OUT)和温度值(TEMP_OUT)输出的数据格式均为16位二进制的补码,可以使用式(1)进行解算:
式中,DATA_VALUE为寄存器的输出数据,VALUE为转换后实际的测量量的值,Scale为寄存器值最小值代表的最小单位,n为对应寄存器的数据位数。
在这里有一个小技巧,由于数据是16位二进制补码类型,可以使用数据类型为整型(int)存储数据,这样亦可以省略其中的数据处理过程。
2 角速率和转角测量系统设计
这里给出了基于LMS8962与CRSl0的倾角测量系统的原理与设计。
2.1 转角测量原理
CRSl0是测量其所在PCB平面的角速率。根据运动学原理,角度等于角速率在时间上的积分,因此,可以得到转角与角速率的关系:
式中,θ是当前角度,θo是运动初始时的初始转角,ω为角速率,to为初始时刻,t为当前时刻。
在数字系统中,采用其离散型方程:
式中,θ、θo、ω的含义与式(2)相同,△t表示采样数据的时间间隔。
根据上述原理,利用CRSl0设计测量转角系统。只要保证采样频率够快,转角平台稳定,噪声较小即可。
2.2 硬件电路设计
使用LMS8962与CRSl0搭建成倾角测量系统,LMS8962是一款高性能的32位Cortex-M3内核微处理器。它有丰富的片内外设,如模数转换(ADC),PWM,CAN和串行总线(SSI)等,功能强大,易于集成。
LMS8962与CRSl0组成的角速率和转角测量系统硬件设计框图如图3所示。LMS8962通过SSI总线与CRSIO进行通信。将采集到的数据存储到SD卡中,将解算得到的结果实时在液晶显示模块上显示。SD卡的数据存储为将来的数据分析提供一个很好的数据采集平台。SSI是串行通信总线,它兼容SPI总线。
- 姿态角测试研究(02-23)
- 基于虚拟仪器的机载陀螺仪测试系统研究(08-03)
- 基于PC/104的陀螺仪动态测试系统设计(01-24)
- CRS10陀螺仪及其在角速率与转角测量中的应用(01-28)
- 海洋环境地磁场三分量测量仪的设计与实现(02-27)
- 陀螺仪和磁罗盘在油田井喷检测中的应用(01-09)