基于单片机的超声波测距系统设计
如图6所示。在发送端发送超声波信号时,P1.2输出高电平,经过反相器后,变为低电平加到触发器的R端,因为没收到反射信号之前,电压比较器输出为高电平,所以基本RS触发器的输入分别为,R=O,S=l,为0态,即Q=0,Q=1,Q的信号加到单片机的中断输入端,因为单片机的中断为下降沿触发,输入为高电平,不产生中断。当发送完毕时,P1.2输出低电平,经反相器,变为高电平送到触发器的R端,没有收到反射回的信号时,电压比较器输出仍为高电平,所以基本RS触发器的 R="1",S=1,为保持状态,即Q=1,Q=0,也不产生中断。当接收到反射回的信号时,电压比较器输出低电平,因此,基本RS触发器的输入端 R="1",S=0,触发器工作在0态,即Q=O,Q=1。单片机的中断输入端的电平由高电平变为低电平,从而使单片机产生中断。
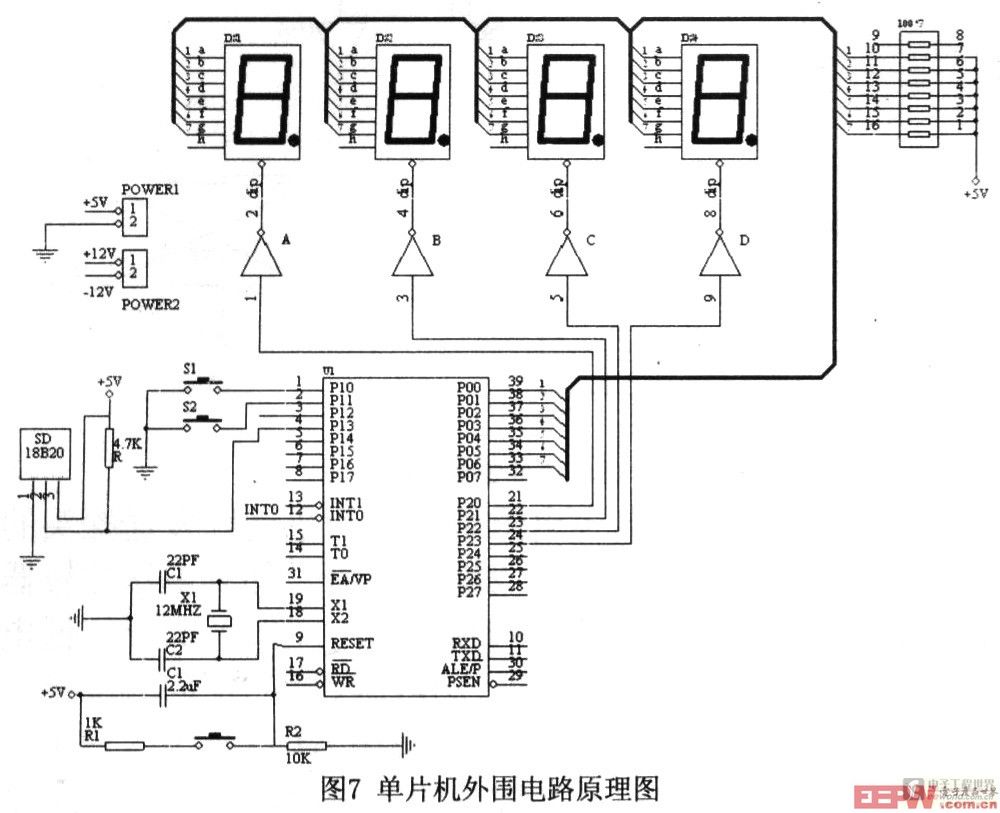
3 单片机外围电路原理图
单片机的外围电路图如图7所示,显示电路由单片机控制七段数码管进行显示,采用数字温度传感器DS18820对环境温度进行检测,从而对超声波的传播速度进行温度补偿,提高测量精度。两个按键用于控制测量的开始与停止以及距离与温度显示的切换。
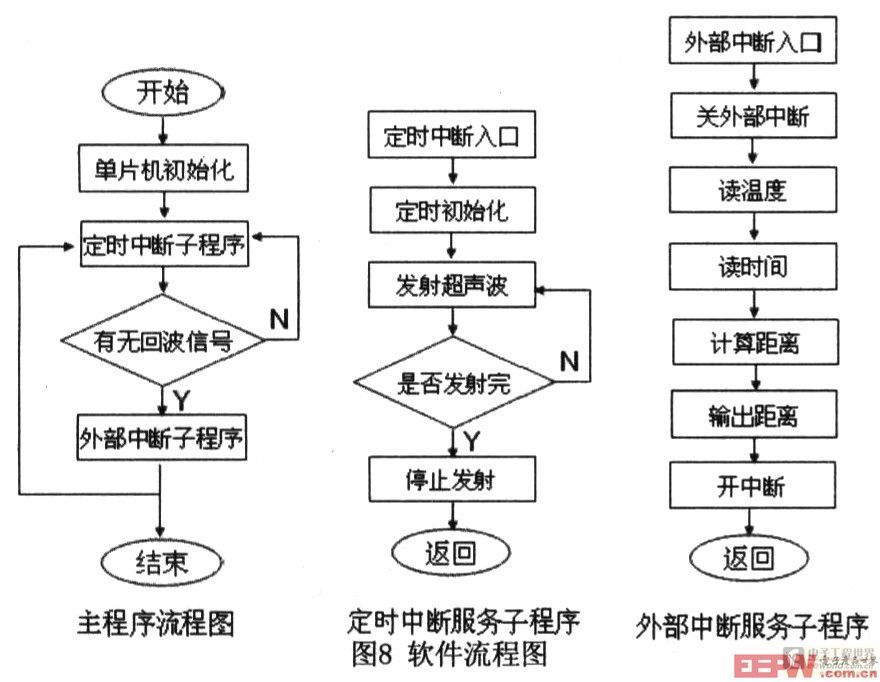
4 软件设计
软件设计包括三个部分,主程序,定时中断程序和外部中断程序,流程图如图7所示。
5 结论
本系统由于发射功率和超声波发射探头的原因,测量距离在10cm到500cm之间,在近距离测量和远距离测量时存在误差较大,在50cm和200cm之间测量时精度最好,误差不大于1cm。在本设计中由于超声波发射周期为10个25μs 的方波,因此发射时间为T=250μs,已知常温下声速C为340m/s,可知S=CT/2=250μs/2=8.5cm,因此确认测距盲区为9cm。即当测量距离小于9cm时不能正确测量。
- 自学单片机心得体会(06-17)
- 基于霍尔传感器的直流电机转速测量系统设计(11-14)
- 基于8051F单片机的数字音频信号源的幅度控制(12-01)
- 动态参数检测与虚拟仪器综合系统设计(11-26)
- 基于C8051F005单片机的小电阻测试仪(01-05)
- 基于MSP430F149的阻抗测量系统设计(01-15)