钻柱振动信号采集系统的研究与设计
摘要:为了实时获取反映井下工况信息的钻柱振动信号,文中设计了钻柱振动信号采集系统。采用压电式加速度传感器实现三维振动信号的测量变送,针对井场复杂布线情况,选用nRF905射频模块进行无线信号传输,利用时钟电路和看门狗电路提高了系统的稳定性和安全性。系统可完成对三维振动信号的采集存储,具有稳定性强,存储容量大的特点,为后续钻柱振动信号的处理提供了高质量的基础数据。
关键词:钻柱振动测量;压电式加速度传感器;三维振动信号采集;保护电路;无线通信
在钻井过程中,钻头与地层的冲击、钻头的偏心钻进、钻柱与井壁之间的摩擦碰撞,都会产生强烈的振动。钻柱振动信号包含了大量的钻井工况信息,通过采集这些振动数据,分析其特征并做出合理的故障诊断,对于减少钻井事故、优化钻井参数、提高钻进速度都具有非常重要的意义。对钻柱振动信号的采集方法分为随钻测量方法和地面测量方法。随钻测量方法是将随钻测量装置安装在钻头附近,用无线或有线的方式将振动信号传输到地面。这种方法采集到的数据失真较小,但由于井下条件恶劣(如高温、高压和高冲击等),对测振装置的寿命及可靠性影响很大,且数据传输的实时性较差,因此应用于振动信号提取的随钻测量技术目前未能普遍应用。地面测量方法是利用能将井底振动的主要信息传递到地面的钻柱作为介质,对其传递的振动信号进行采集,以识别钻柱共振、钻头磨损、钻柱与井壁摩擦等工况特征,根据特征值判断钻头遇卡、溜钻、顿钻等故障。与井下振动测量相比,地面测量的风险较小,数据传输可靠性高,易于推广。
目前,国内正逐渐形成一股研究钻柱振动信号的热潮,刘志国等人已设计出一套振动信号的采集与分析系统,但存在着稳定性不足、振动测量信息反馈不全面等问题。因此,本文设计了具有强稳定性,大存储空间的钻柱振动信号采集系统。在微控制器外部添加NAND flash存储器以扩展对特征信号的存储空间,在系统中设置了外部看门狗和时钟电路对系统进行实时监测,配合软件对异常情况进行及时备份并恢复正常工作状态。
1 系统总体设计
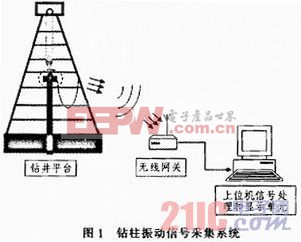
钻柱振动信号测量系统需要具备对钻柱的三维振动信号进行实时动态数据采集、存储及传输的功能。本系统由数据采集模块、存储模块、无线传输模块以及保护模块组成。为了更全面地测量钻柱振动信号,系统以钻柱的三维振动信号为被测对象,通过三轴压电式加速度传感器将振动信号转化成电信号,经信号调理电路调整送入C8051F005微控制器处理。由于钻井平台布线困难,系统选用nRF905射频模块,将数据以无线的方式传送到附近的上位机进行处理、存储和显示,增强了系统的灵活性。恶劣的现场环境要求系统具有较高的稳定性,本系统应用了外部看门狗和时钟模块,使得系统能够实时监控自身异常,配合软件设计实现自我备份和恢复。
钻柱振动信号采集系统结构如图1所示。
2 系统的硬件设计
钻柱振动信号采集系统按照功能分为数据采集模块、单片机微控制器模块、扩展Flash存储器模块、无线通信模块和保护模块。
2.1 数据采集模块
系统选用三轴型压电式加速度传感器作为测振元件,此传感器具有灵敏度高,体积小,重量轻,使用寿命长,动态范围大,频率范围宽,坚固耐用,受外界干扰小等特点。
本系统的压电式传感器主要参数选择:三轴;量程范围±10 g;灵敏度500 mv/g;频率范围0~2 000 Hz;温度范围-40~125℃。
2.2 微控制器
本系统采用C8051F005作为主控芯片,它是Silicon Lab公司的12位单片机,具有64管脚TQFP封装,SPI串行接口,12位8通道的AD,供电电压为5 V。其中12位的AD满足对所采集振动信号的精度要求。若所处环境要求苛刻,可适当提高芯片品级;若需提高现场芯片的数字运算能力,也可采用DSP替代。
2.3 数据存储模块
要完成振动信号的实时采集和存储,要求系统具备足够的存储空间并且具有较高的存储速率,需扩展外部高速存储器。本系统采用三星公司的NAND结构的Flash存储芯片——K9F1G08UOM。此芯片的各端口与C8051F005的端口连接,通过C8051F005控制端口的输入输出,即可方便实现对Flash存储器的读取与写入操作。
2.4 无线通信模块
无线技术的应用省去了现场布线的麻烦,为系统的安装提供了更多的选择。由于系统长期处于户外作业,对信号保真度的要求较高。此外为了更好地对钻井作业进行实时监控,对异常情况及时作出调整,需要有较高的信号传输速率。综合考虑,本系统采用Nordi公司的nRF905射频收发模块实现无线数据收发,并提供RS-232接口,实现与PC机的实时直连通信。nRF905由频率合成器、接收解调器、功率放大器、晶体振荡器和调制器组成,具有低功耗的Shock Burst工作模式,可自动完成前导码的工作,可由片内硬件自动完成曼彻斯特解码,使用SPI接口与微控制器通信,配置非常方便。
2. 5 保护模块
由于本系统应用于钻井平台,不会经常性地更换或维护,要求系统有自我检测和恢复的能力。因此,本系统引入了看门狗电路和时钟电路,通过软硬件的结合,实现系统自我检测、现场自我恢复等保护功能。
2.5.1 看门狗电路
本系统选用的X5045是一种集看门狗、电压监控和串行EEPROM 3种功能于一身的可编程芯片。这种组合设计减少了电路对电路板空间的需求。芯片中的看门狗对系统提供了保护功能,当系统发生程序故障时,自动通过RESET信号向微控制器发出复位请求。
2.5.2 时钟电路
软件实现时钟需要编写的程序复杂,代码多,且单片机软件开销大,时间信息也不易长期保存。为避免以上问题,本系统采用美国Dall as公司的DS1305实时时钟芯片非易失性地保存时间信息。它有20脚的TSSOP、16脚的DIP两种封装方式,工作电压范围从2.0~5.5V。DS1305采用BCD码表示实时时钟的秒、分、小时、星期、日、月和年的时间信息,并且自动对小月和闰年的日期进行调整,兼有带AM/PM指示12小时和24小时两种时间指示格式。
系统硬件功能结构图如图2所示。
- 基于发动机测试的便携式振动分析仪(09-17)
- 基于虚拟仪器的振动信号采集与处理系统(04-05)
- 基于FPGA和MV-D1024E相机的图像采集系统(06-25)
- 多点快速采集系统中信号可靠转贮技术研究(06-11)
- 基于加速度计的步态数据无线采集系统设计(08-28)
- 基于ADS1259的高精度采集系统设计(01-09)