自触发脉冲激光测距飞行时间测量研究
极管输出的电信号经放大和时刻鉴别后,输出一高电平信号,作为发射单元的输入信号,其间电路延时t11;此高电平信号使激光驱动源终止驱动激光器,激光发射单元停止发射激光,其间电路延时t21;而后经过△T的延时,光电二极管从有激光接收状态转变为无激光接收状态;再经过t12的电路延时,接收单元的输出转变为低电平;此低电平信号使激光器再次发射激光,其间电路延时t22。上述过程构成了自触发脉冲飞行时间激光测距的一个完整周期。如此周而复始,就形成了周期激光脉冲序列。该测距信号从接收单元取出,输入到周期测量单元获得周期T0。根据公式(2),函数F有如下的形式
其中TN=NT0,τ=t11+t21+t12+t22,通常情况下t11≠t12,t21≠t22。在自触发脉冲测距方法中,周期T0可以通过测量一次时间间隔TN后取平均值得到,这其中包括N个周期T0,其精度等效于用传统的脉冲测距方法进行N次单次测量后取平均的结果。因此,自触发脉冲测距方法可以在获得高精度测距结果的前提下极大地缩短测量时间,提高测量速度。与其他传统脉冲测距方法相比,自触发脉冲方法的本质特点是脉冲测距信号不是单个而是连续周期性的。
2 基于CPLD的飞行时间测量单元实验设计
CPLD具有集成度高,工作速度快,编程方便和价格低廉的优点。与FPGA(Field programmable gate array)相比,CPLD内部逻辑结构简单,连线相对固定,延时小且可以预测,更有利于器件在高频下工作,特别适合产品样品的开发与实验。
本设计采用ALTERA公司MAX II系列CPLD器件实现自触发脉冲激光测距的飞行时间测量系统。MAX II系列器件是在ALTERA公司的第三代MAX结构基础上,采用先进的COMSEEPROM技术制造的高密度,高性能的可编程器件。MAX II系列器件采用0.18μm Flash工艺,逻辑单元数(LE)240个、宏单元数192个、最大用户I/O管脚80个、用户Flash存储器8 k,引脚到引脚的延时为3.5 ns,计数器频率可以高达300 MHz。MAX II系列器件内置JTAG BST电路,通过JTAG接口可实现在线编程,从而可以灵活修改设计,缩短了开发周期。图3是利用CPLD实现的自触发脉冲激光测距飞行时间测量系统的电路框图。
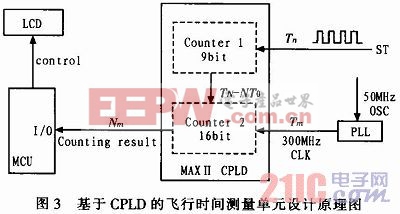
如图所示,CPLD完成飞行时间计数测量的功能,单片机读取计数结果并进行数据处理,最终的结果显示在液晶显示屏上。CPLD内的电路主要由两个计数器组成,Counter1为9bit的计数器,对自触发脉冲激光测距的周期信号ST进行计数,得到首尾相接的N个测距周期对应的起止时刻,对应的时间间隔TN=NT0,系统中可以自己设定N的值。Counter2为16bit计数器,对N个测量周期的时间间隔NT0进行计数测量,输出计数结果Nm。采用50 MHz晶振通过锁相环6倍频获得300MHz的时钟频率,作为时间测量计数的基准时钟频率。单片机读入计数结果,进行数据处理后将最后的结果显示出来。单片机采用Cygnal公司的C8051F系列,与8051的指令集兼容,单数据处理速度更快,有利于脉冲激光测距仪的高速度应用。
如图3所示,假设时间测量的计数基准时钟周期为Tm,则:
其中fm=1/Tm为飞行时间测量计数基准时钟频率。
任意取N=256,fm=300 MHz代入,忽略电路延时τ,可以计算得到Dmax=64 M,δD=0.98 mm。即该设计通过运用CPLD可以得到的飞行时间测量系统的理论计算值可达到最大量程64M,测量精度0.98mm。
3 结论
自触发脉冲激光测距是一种新型的脉冲激光测距方法。该方法克服了传统脉冲激光测距测量精度和测量速度之间的矛盾,容易获得高精度的测距结果。文中讲述自触发脉冲激光测距原理及其光电脉冲的时序逻辑,设计实现了基于CPLD的自触发脉冲激光测距飞行时间测量系统。理论计算表明利用CPLD设计自触发脉冲激光测距飞行时间测量电路是一种很好的方案。它可以使计数时钟工作在较高的频率,并且结构简单,可靠性高,体积小,功耗低,成本低廉。在测量距离64 M的范围内可以达到0.98 mm的测量精度,远高于传统的激光测距,尤其适合便携式,高精度激光测距应用。
- 基于Virtex5高性能FPGA的脉冲激光测距系统设计(01-02)
- 基于AVR的激光测距机综合性能检测设备设计(02-07)
- “节能之星”EFM32应用方案——手持式激光测距仪(06-25)
- 手持式激光测距仪在矿井下的作用(01-06)
- 手持式激光测距仪的功能参数(01-06)
- 激光测距仪漫反射问题(01-04)