基于C8051F020海水预处理模块测控系统设计
摘要:根据对海水预处理模块控制要求的分析研究,提出设计一套能同时调节海水温度和流量的预处理模块控制器,该控制器使用Cygnal公司8位微处理器C8051F020作为主芯片,并给出了测控模块软、硬件设计方案,该控制器已经在海水预处理模块上试验成功。试验结果表明,该控制器设计稳定,具有很好的工程应用价值。
关键词:预处理;死区;调理模块;海水淡化
0 引言
在对海水淡化装置实际使用过程中发现,装置实际工作参数一般不同于设计工作参数,使得装置无法发挥原设计系统流程特点,性能不佳;这种情况是由于实际进入装置的海水温度很难与设计温度一致造成的。此类现象对于海岛用海水淡化装置影响尤其明显:由于其特殊使用环境和条件,在不同季节和海域,海水入口温度变化很大,造成装置运行不稳定,产水量不足、水质下降严重,甚至不能工作。
为克服此类问题,本项目开展了海水进口调节模块设计技术研究,使控制器具有海水进口温度、流量的调节作用,始终保证进入装置的海水进口温度在设定值,使得装置的流程参数在不断变化的外界环境条件下保持在设定工况参数不变,从而保证淡水产量和水质,也使得装置易于控制和维护。
1 系统设计
根据对系统要求分析,设计出海水预处理系统(如图1中虚线框内),将进入海水淡化装置的海水与装置排出的浓海水进行预混合,利用浓海水的余热,控制海水原水和浓海水比例,将进淡化装置水混合成系统需要温度和流量的海水。
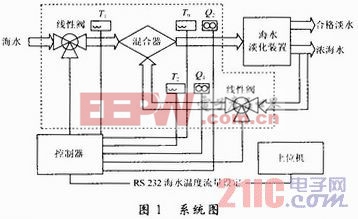
从系统图可以看出,进入海水淡化装置进水量(Q)应保持恒定,控制关键在于管路上的两个线性阀调节的控制,它用于调节进入混合器的海水(Q1)与浓海水(Q2)的比例,由于进入海水温度随时变化,所以调节器应该是随动系统。
2 控制器硬件设计
控制器分为硬件部分和软件部分,硬件部分又分为:电源模块、处理器模块、A/D转换模块、D/A输出及放大模块、温度调理模块以及通信模块,整个系统的硬件结构原理如图2所示。

电源模块主要是为系统处理器供电,并为传感器和D/A输出提供隔离的电源;处理器模块是系统的控制核心,采用美国Cgynal公司开发的基于8051内核的C8051F020,C8051FXXX系列单片机是完全继承的混合信号系统级芯片(SoC),具有与8051指令集完全兼容的CIP-51内核。它在一个芯片内集成了构成一个单片机数据采集或控制系统所需要的几乎所有模拟和数字外设及其他功能部件。它把原来8051系统中断源由
7个扩展到了22个,中断系统需要更少的MCU干预,内部集成了能独立工作的时钟发生器,以及A/D转换器、D/A输出、SPI总线接口、5个16 b定时器、多达64个可编程I/O端口。
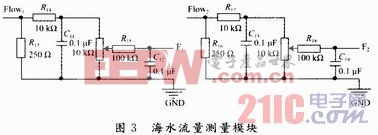
C8051F020内部集成了A/D转换模块,此模块用于将各路传感器信号转换成数字信号,本控制系统中主要是对海水流量和线性调节阀的位置进行测量,海水流量输出的是4~20 mA的标准信号(Flow1,Flow2),通过采样电阻R13和R16转换成1~5 V电压信号后进行A/D转换,而线性调节阀位置反馈直接决定了进入混合器的浓海水和海水的混合比例,其输出信号为电压信号,直接经过滤波后进入MCU进行A/D转换。流量采集模块原理如图3所示。
线性调节阀用于控制海水和浓海水进入混合器的比例,其开度与输入控制电压(0~10 V)成线性关系,MCU通过SPI总线与芯片LTC2622互连,LTC2622将MCU输出数字信号转换成模拟电压信号(0~2 V)后控制线性调节阀,采用SPI总线连接数模信号可以避免信号间的串扰,而LTC 2622输出电压信号(0~2 V)需要经过LM258放大5倍后连接到线性调节阀的输入端。D/A输出转换模块原理图如图4所示。
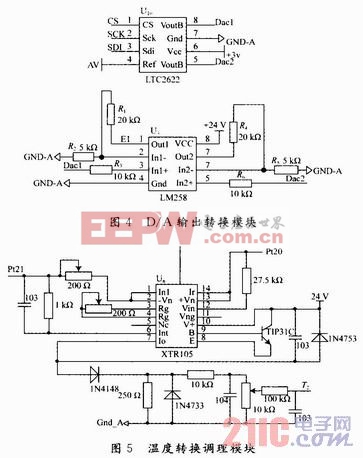
海水淡化装置要求经过混合起后的海水温度为一个定值,为了满足温度要求.必须准确测量入口及出口处的海水温度,温度调理模块主要是对PT100信号进行调理并输出标准信号到MCU,本控制器选用XTR105作为温度调理模块,该芯片是美国BURR-BROWN公司生产的专用于温度检测系统中的温度-电流变送器,它可以将电阻温度变送器中的电阻值随温度的变化量转换成电流信号,该电流值仅与RTD阻值有关,而与线路电阻无关,不仅可以消除线路电阻所产生的误差,而且可以对铂热电阻中的温度二次项进行线性补偿,提高温度检测系统的线性度和精度,详细的温度测量模块如图5所示。
通信模块将设定流量和温度传输到控制器,并实时显示预处理模块各个参数。本控制器采用通用RS 232接口直接与PC互连。
3 控制器软件设计
系统软件分为主流程和多个子流程,主流程主要是对各路传感器信号进行循环转换采集分析,并对采集到的实际值与理论值进行比较,然后反馈到两路线性调节阀的开度上,由于系统设计必须满足温度和流量两个设计值,所以在控制策略上分为两个流程分别对温度和流量进行调节。对于温度误差允许的死区范围为±0.5℃,流量误差为±0.1 L。如果系统温度和流量在死区范围内,不进行调节,只计算理论与实际值误差,超出误差范围后进行分段调节,即在调节过程中不断比较,一旦满足调节立刻停止。采用这种调节方式可以使系统很快收敛,具体系统主流程图如图6所示。
- 基于C8051F020的示波器监控程序设计(08-22)
- 无创血氧饱和度检测仪的设计(01-13)
- 基于C8051F020单片机的实时测控装置设计(04-24)
- 基于C8051F020的高精度超声波测距系统设计(04-22)
- 浅析基于C8051F020的示波器监控程序设计方案(10-16)
- 基于ARM的综合测试仪设计(05-26)