智能型重力加速度测试仪的研制
摘要:智能型重力加速度测试仪,是在原单摆实验装置的基础上,采用单片机和红外光电传感器实现对摆球的检测和控制,进而实现自动释放摆球、自动计数、自动计时、同时将检测信号进行自动处理,算出重力加速度。使传统单摆测量重力加速度的方法得到了较大的改进,提高了测量精度。
关键词:单摆;重力加速度;单片机
0 引言
目前大学物理实验中单摆测定重力加速度的传统测量方法一般采用机械秒表手动计时,人工计数,由于人的反应能力有限,易产生计时和计数误差;而且手动释放小球容易形成圆锥摆,对测量结果造成较大影响;再加上它是运用简谐振动原理的一种近似的测量方法,测量精度受小球摆动的次数n、单摆的摆长l、摆角θ和是否形成圆锥摆等多种因素的影响。为了研究单摆测定重力加速度实验,我们设计制作了重力加速度智能测量装置,利用它能够实现键盘输入数据、自动计数、自动计时、自动释放摆球、自动计算并显示当地重力加速度的数值,利用该自制装置,可以对影响测量精度的多种因素做深入细致的研究。
1 原理与误差分析
利用单摆测重力加速度的传统方法是用一根不可伸长的细线一端系住小球,另一端固定,使小球在重力作用下做简谐运动。测出摆长l(包括多次测量的小球半径),和小球摆动n(n>10)次的时间t,求出n次摆动的平均周期T,利用式(1)

只有θ角很小时,才可忽略其影响,重力加速度的表达式才可简化为(1)式,但是究竟θ多小时才算是很小?按微小误差准则,应当是由于忽略θ引入的误差小于其它项误差的1/3才可以。
再者摆长l和时间周期T的测量也会形成测量误差,由误差合成原理可得由l和T引起的测量重力加速度的相对误差为
由t=nT(n为小球摆动的次数,T为小球摆动的周期)得
由摆长l和时间周期T形成的误差应有正负,由式(3)得忽略θ角引起的误差应为负误差,因为g测与理论值相差很微小,所以示值相对误差为
总绝对误差为△g=g测×Eg (10)
实际值为g实际=g测±△g (11)
2 实验装置
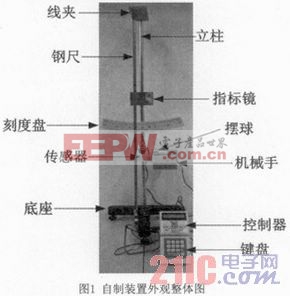
2.1 实验装置外观整体图
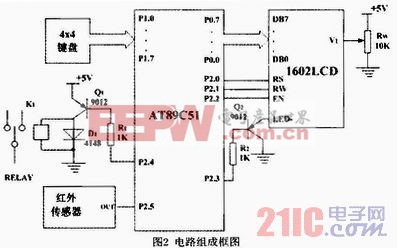
2.2 实验装置控制系统框图
整体电路部分主要有控制模块、键盘部分、摆球自动释放装置、计数模块、计时模块、显示模块等几部分,电路组成原理图如图2所示。
将单摆按顺序安装完毕,用钢卷尺和游标卡尺分别测量出摆线长和摆球直径(测量5次取平均值)使摆角为3°,接通重力加速度智能测定装置电源,从矩阵键盘中输入单摆摆长和摆球摆动次数,然后按下确认键,摆球释放。
当1602液晶显示器计数摆动次数“n=00”时,定时器自动计时,当设定的次数到达时,定时器停止计时并显示总时间。
在重力加速度测定装置键盘上设定多种摆长、多种小球摆动次数对应的重力加速度的数值,将在液晶屏上自动显示出数值。
测试结果见下列各表。
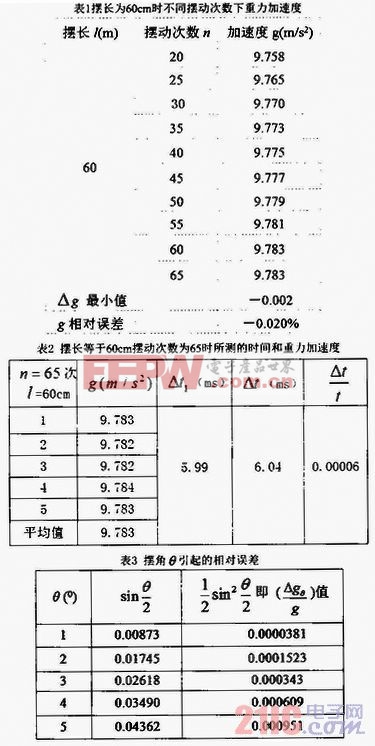
(1)由所测数据可得,单摆长等于60cm、摆动次数为65时测得误差最小,使用重力加速度测定装置比原来传统方法精度可提高30~50倍,可见改进后的测试系统比传统测试系统性能优越。
(2)由所测数据可知,摆动次数越大越好,但是应有一定限度,摆动次数到达60次和65次时测量结果基本上不变,最大摆动次数取65。
(3)同样使用重力加速度智能测定装置摆长越大越好,但是摆长过大,空气阻力增大,测量精度下降,由以上表格可见摆长超过60cm以后,测量精度反而降低,故摆长选定60cm为宜。
(4)由表1、表2数据代入式(6)、(9)可得由长度和时间引起的测量误差
 。
。(5)由表2得本次测量重力加速度的测量值为g测=9.783m/s2。
(6)由式(11)得本次测量重力加速度的实际值为g实际=9.784m/s2±0.003 m/s2。
山东省菏泽市处于东经115.43°、北纬35.24°、海拔36~50米,重力加速度计算公式为
g理=980.616-2.5928cosφ+0.0069 cos2φ-3.086×10-6Hcm/s2 (12)
其中H为海拔高度,φ为所在地区的纬度。由式(12)计算得菏泽本地的重力加速度约为9.785 m/s2。可见采用改进后的实验装置测量的重力加速度的值,与用公式计算出的菏泽本地加速度基本相等。
- 智能型电缆测试系统的设计与实现(03-11)
- 智能型PXI Switch Module 在自动化测控系统中的应(06-11)
- 智能型通用水下自救释放系统(02-13)
- 旋转状态下动态倾角测量系统设计(10-28)
- 高、低频测量压电加速度传感器应用指南 (04-27)
- 高低频测量压电加速度传感器应用指南(05-12)