调频连续波雷达(FMCW)实现汽车相对距离和速度的测量
汽车雷达系统通常采用FMCW技术

与脉冲雷达相比,FMCW雷达更小,使用更少的功率,而且成本更低。但是,FMCW雷达比较适合于近程探测。自动巡航控制(ACC)的汽车雷达(LRR)通常采用77 GHz附近的频带。雷达系统通过不断地估计其所在车辆和其前方的车辆之间的相对距离和速度,并及时告警驾驶员。
FMCW的距离测量原理
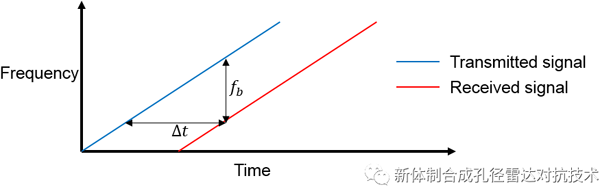
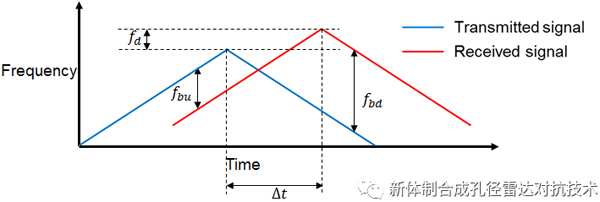
接收信号是发射信号的时间延迟,延迟量与汽车间相对距离有关。在频率扫描期间的任何时刻,发送信号和接收信号之间的频率差fb是常数,称为拍频。因为扫描斜率不变,所以可以从拍频得到时间延迟,然后将延迟转换为距离。
根据需求分析参数
在ACC中,雷达需要监测的最大范围大约为200米,扫描时间应该是往返时间的至少5到6倍,根据最大范围所需的时间来计算扫描时间约为8us。
系统需要能够区分相距1米的两个目标,根据距离分辨率确定扫描带宽150MHz,并用扫描带宽和扫描时间计算扫描斜率。
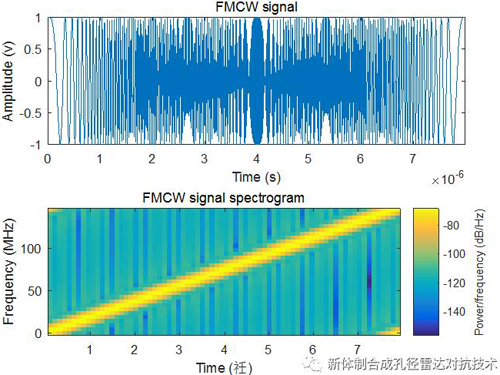
· 对于复采样信号,采样率可以设置为与带宽相同。· 雷达需要检测的最大拍频是对应于最大距离的拍频和最大多普勒频率的和。根据实际情况假设行驶车的最高速度约为230km/h,计算可得最大距离对应的拍频为25MHz,最大速度对应的多普勒偏移为32.8KHz。
根据以上两点,系统需要的采样率设置为150MHz。发射信号及其频谱如下图所示。
雷达系统设置
雷达系统包括发射机,接收机和天线,对主要组件进行建模,并省略其他组件(如耦合器和混频器)的影响。另外,为了简单起见,假设天线是各向同性的,并且天线的增益包括在发射机和接收机中。
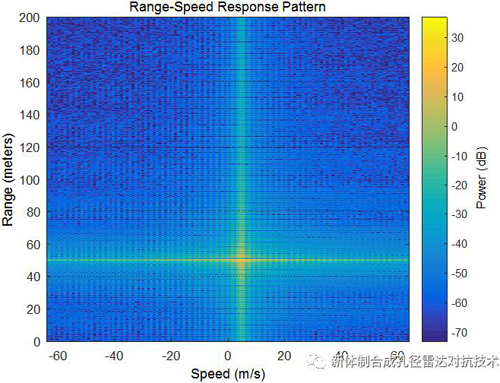
雷达通常也在运动中,假定雷达随汽车正沿着x轴以30m/s的速度行进,同时前方距离50m处有一辆以25m/s的速度同向行进的汽车。因此,汽车目标以5m/s的相对速度接近雷达。
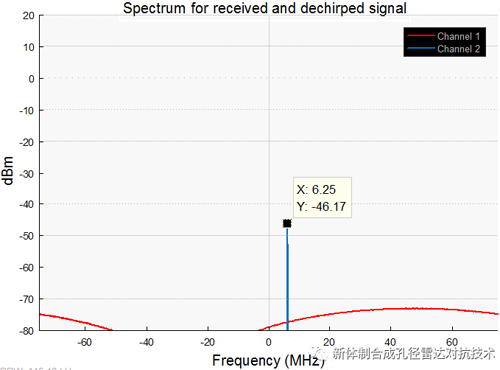
FMCW雷达通过拍频来测量距离,为了提取该频率,需要将接收信号与发送信号混合来进行去斜操作,去斜后的信号仅包含对应于目标范围的各个频率分量。
在一个脉冲内,多普勒频率与拍频不可区分。为了测量距离和多普勒,FMCW雷达通常执行以下操作:
· 波形发生器产生FMCW信号。· 发射机和天线放大信号并将信号辐射到空间。
· 信号传播到目标,被目标反射,并传播回雷达。
· 接收天线收集信号。
· 接收的信号被去斜后存储。
· 多个脉冲后,在距离和多普勒中执行傅里叶变换以提取拍频以及多普勒频移。然后可以使用这些结果估计目标的范围和速度。距离和多普勒也可以显示为图像,并给出目标在范围和速度域中的位置的直观指示。
距离多普勒耦合效应
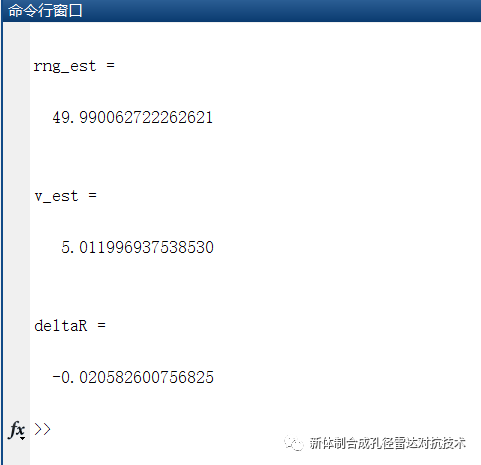
目标距离对应于拍频,准确的距离估计取决于拍频的精确估计。然而,多普勒频移的存在改变了拍频,导致距离估计偏差。本设置中,由目标和雷达之间的相对速度引起的距离误差是0.02m,可以安全忽略。
上面的设计足以实现期望的性能,但是在上述设置中,扫描时间约为8微秒,系统需要在非常短的时间内扫描150MHz频带,会导致成本增加。此外,考虑到汽车的速度,并不需要每8微秒进行测量。
因此,汽车雷达经常使用更长的扫描时间,例如1ms。较长的扫描时间使得多普勒耦合的范围更加突出。 为解决这个问题,可采用三角扫描模式。
雷达 相关文章:
- Tesla前向77GHz防撞雷达黑科技破解(09-13)
- 雷达在汽车主动安全系统中的应用知识介绍(12-03)
- 毫米波汽车防碰撞雷达技术原理及研发进展(12-14)
- 超宽带雷达信号电路的设计与实现(10-18)
- 汽车防撞雷达系统功率放大器仿真设计(01-30)
- 车用毫米波雷达传感器组网技术研究(11-16)