雷达在汽车主动安全系统中的应用知识介绍
汽车安全性能是汽车技术发展的一个重要课题。为了提高车辆的行车安全性能,各种先进技术被应用在汽车上。下面介绍汽车雷达在新型主动安全系统车辆上的应用,对其系统结构、工作原理及设计思路进行阐述;希望能对今后主动安全性能研究开发起到一定的指导作用。
汽车的主动安全技术可以将意外事故防范于未然,越来越受到各大车企及消费者的重视,更多的先进技术也被应用到其中。以雷达测距技术为核心的预碰撞安全系统及自适应巡航控制系统成为近几年主动安全系统新向标。
预碰撞安全系统
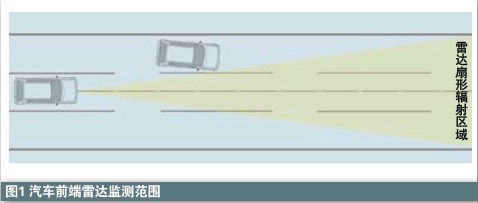
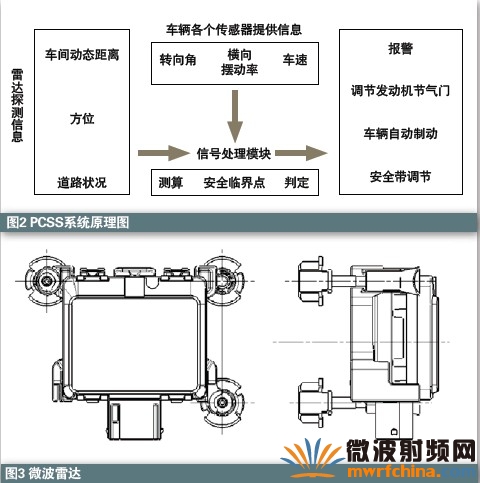
预碰撞安全系统简称PCSS,它主要由实时监测雷达、各种传感器、信号处理模块、报警模块及执行机构组成;该系统的核心技术是利用安装在车辆前端的雷达装置对前方动态车辆及障碍物进行测距,并将测得的车辆及障碍物信息反馈给系统信号处理模块。
信号处理模块将雷达反馈信息与车辆各个传感器信息统合计算,计算出带有PCSS系统车辆与前方障碍物的相对距离和相对速度。在距离与速度无法满足系统预先设定的最小安全值时,执行机构将会启动车辆上安全装置辅助驾驶者对车辆行驶进行控制,以实现主动防碰撞的目标。
执行机构针对安全危害级别所做出辅助控制如下:第一调节发动机节气门开度,减小车辆动力输出;第二操作制动器对车辆制动,避免车辆的碰撞或减轻碰撞程度;第三收紧安全带,防止乘车人员受伤害。
自适应巡航控制系统
自适应巡航控制系统简称ACC,该系统与预碰撞安全系统工作原理基本相同。在车辆行驶过程中,安装在车辆前部的车距传感器持续扫描车辆前方道路状况,同时轮速传感器采集车轮转速信号。当ACC系统车辆前方道路畅通时,巡航速度控制按驾驶者意愿设定车速并保持等速行驶;当前方出现障碍车辆或与前车之间距离过小时,ACC控制单元可通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。自适应巡航控制系统在控制车辆制动时,通常会将制动减速度限制在不影响舒适的程度,当需要更大的减速度时,ACC控制单元会发出声光信号通知驾驶者主动采取制动操作。当与前车之间的距离增加到安全距离时,ACC控制单元控制车辆按照设定的车速行驶。
雷达的分类及概况
按雷达的测量介质不同,可将车用雷达分为超声波雷达、红外线雷达、激光雷达及微波雷达。由于超声波雷达、红外线雷达的探测距离相对较短,目前主要应用在车辆倒车控制系统中。而激光雷达和微波雷达具有测距远、精度高等优点,被广泛应用于汽车主动安全系统上。
激光雷达按测量原理不同可分为脉冲式和相位式。激光雷达的优点是结构相对简单,具有高精度、高方向性、探测距离远、能识别道路状况及产品价格便宜等特点。采用激光雷达的预碰撞系统先从激光扫描雷达所获得的车距与方位数据中抽取有用的数据,依据后车的动力学特性进行车辆路径的估算,行车路径估算的半径R是根据车速和转角第一次估算的半径R1与根据车速和横向摆动速率第二次估算的半径R2来确定的。
不过激光雷达的光学性能易受环境因素的影响,在雨、雾、风沙及雪的天气情况下,其测量性能会有所下降。由于激光雷达接受的目标物信号会含有干扰源,在预碰撞系统上应用时只能传输相对车距信息,并通过信号处理模块对距离信息准确快速的计算,得出相对车辆速度信息。
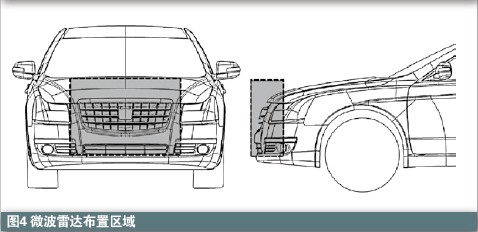
微波雷达按测量原理不同可分为脉冲调频式和调频连续波式。微波雷达采用毫米电磁波作为探测介质,其波长均为毫米级,故也可称为毫米波雷达。微波具有探测距离远、穿头能力强、运行可靠以及实时性佳等优点。并且测量性能受环境及天气等外界因素的影响较小,可直接探测获得PCSS系统车辆与前方目标车的距离和相对速度信息。在主动安全系统中雷达所使用的微波频率主要集中在三个频段,分别是23GHz~24GHz、60GHz~61GHz、76GHz~77GHz。在这三个特定频段上的微波辐射能量衰减特性较大,使雷达信号的传播限制在一个较为合理的范围之内,从而降低对其它车辆雷达及无线通讯设备的影响,并减少对周围人体的辐射。
雷达的布置要求
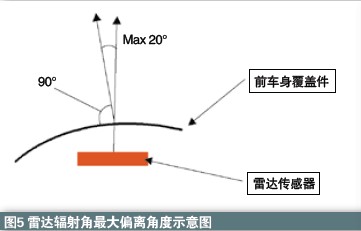
为了满足PCSS及ACC系统功能的正常使用,雷达一般布置在车辆前端离地面300mm~1000mm之间,并在车辆水平中轴线方向±500mm范围内的空间区域。此区域雷达前端可能存在的覆盖件,例如保险杠、雷达天线屏蔽器、散热器格栅或车辆品牌标徽等。理想的微波雷达布置位置是前方没有覆盖件或只有塑料材质的覆盖件,因为金属材质的覆盖件会影响微波雷达的信息反溃如果雷达必须安装在一些覆盖件的后方,为使雷达完
汽车雷达 相关文章:
- 汽车雷达的未来趋势:面向79GHz频段(01-27)
- 77GHz汽车雷达系统PCB板材的三大技术特性(06-20)