基于PC104的低空测试仪测控程序设计与实现
摘要:低空测试仪试验需要把整个测试仪作为吊舱挂在直升机下工作,能适应各种恶劣的自然条件,用于某飞行部件地海杂波环境下的测试。以PC104嵌入式计算机为硬件平台,标准C++为开发工具,针对低空测试仪数据采集需求开发了测控程序。通过电平I\O控制电源板给各信号加电时序,A\D卡实时采集信号,高度表通过串口回传高度数据。着重介绍了低空测试仪的软硬系统设计方案,给出了一组测试数据,验证了测控程序的有效性。现场应用表明,该系统具有设计合理,操作简便,测试准确的特点,达到了设计要求。
关键词:低空测试仪;直升机;PC104总线;数据采集
低空测试仪需要作为一个整体吊挂在直升机下,这就要求测试仪体积小、实时性好、工作温度范围宽、可靠性高、能适应各种恶劣自然条件,并有持续的高速数据采集能力。而嵌入计算机PC104,凭借其体积小、功耗低、集成度高及模块化等一系列优良品质,满足此要求。而且,PC104在嵌入式应用设计中,除了有显示要求的情况外,通常作为一种“黑匣子”的工作模式,即没有显示。而低空测试仪就是后者的应
用。数据的下载是通过插入U盘自动下载的,不需要拆卸拆卸硬盘下载数据,方便多次测试。
1 测控系统需求分析
通过对测试仪测试原理的分析及操作流程的分解细化,在系统设计时主要考虑一下几点:
1)测试仪不仅要能够在有地海杂波的情况下对某产品的相关输出信号进行持续的采集,而且采集信号的同时记录产品距离地面或海面的高度;
2)在硬件上采用成熟的平台,使系统集成度高、可靠性高和维修性强;
3)采用定时数据采集控制方式,因直升机上不让使用无线遥控装置,可在起飞前设置好延迟时间,起飞后当预定的延迟时间到时,自动开始数据采集,也可设置采集停止时间;
4)采集的数据可通过U盘自动下载,然后导入地面计算机中进行分析和处理;
5)地面计算机能确定哪些数据超过规定的门限值及对应的高度,并对数据进行分段FFT处理分析;
根据低空测试仪试验测控需求的特点可以归纳出对测控系统的性能需求,主要包括:
1)数据记录时长≤1 h;
2)采集速率≥100 ks/s;
3)测高范围1~1 200 m。
2 测控系统总体设计
该测控系统结构如图1所示,在对被测产品的测试过程中,通过控制系统控制供电系统,给被测产品、嵌入式计算机和无线电测试仪供电;嵌入式计算机控制给被测产品各信号加电时序,何时开始采集数据和何时停止采集;一次试验结束后,通过U盘导入地面计算机进行分析。

图1中除了地面计算机外,其他的设备都需要密封在玻璃钢下。这就要求玻璃钢能装下被测设备、数据采集系统、蓄电池等,具有一定气动力形状,具有两个水平翼和一个垂直尾翼,减少飞行中的阻力,被测设备的天线位于吊舱的底部和高度表天线位于吊舱的水平翼上。
3 测控系统硬件设计
如图2所示,测控系统硬件主要PC104电源板,PC104CPU板,PC104数据采集卡,PC104继电器开关板和无线电测高仪组成。

PC104电源板用于为PC104 CPU板提供高效、稳定的12 V电源。PC104 CPU板控制A\D采集卡实时采集每通道的数据,速率为200 kS/s;通过串口采集无线测高仪的数据,速度为25 Hz;继电器开关板用于按时序给产品加-18 V,+18 V和+27V。
无线电高度表是测量飞行器相对地面(海面)垂直高度的距离测量系统。主要有主机、收发天线和连接电缆组成,如图3所示。

4 测控系统软件设计
该测控系统的软件采用VC++6.0编程,运行在Windows XP系统下,可以在PC机上编译后通过U盘拷贝到PC104主机,也可以直接在PC104主机上开发。测试系统的软件分为上位机软件即低空测试仪中软件和下位机软件即地面分析计算机中软件。
1)上位机软件
由于只有4G SSD板上硬盘,2G用来存采集的数据,而高速AD卡采集速率多大1.0 MHz/s,所以采集数据时间有限,硬盘空间剩余不足100 M时,系统就自动关闭,防止系统崩溃。2 G用来装Window系统,需要对window进行适当的裁剪,以便为采集数据预留更多的空间。
由于测试仪最终被玻璃钢密封舱,对外只留下开关和一个USB接口下载数据,何时下载数据就依靠检测U盘的插入,具体的动作时序如图4所示。
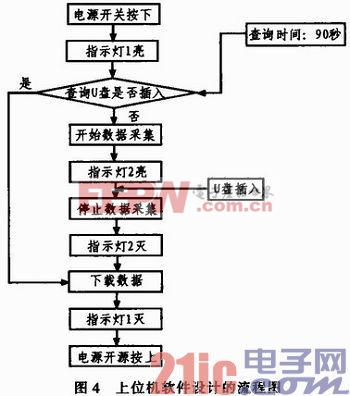
首先需要按下电源开关,指示灯1亮,说明系统正常启动,此时开始检查是否插入U盘,如果没有插入U盘,就采集采集数据,一个采集周期结束就需要插入U盘把数据下载下来,或者直接关机,等下次开机上下载;
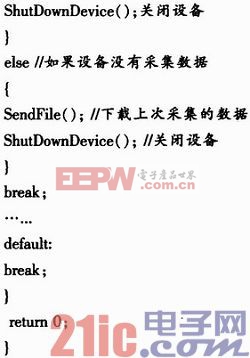
插入U盘后,响应函数的源码如下: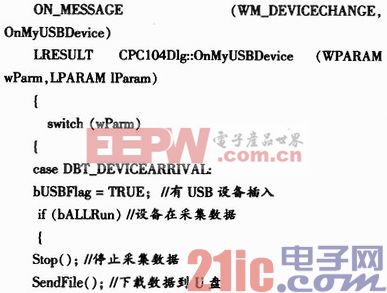
2)下位机软件
下位机软件是用来分析从U盘拷贝过来的数据,本软件用也是用C++语言实现,主要有以下几个模块组成:数据处理模块、文件模块、工具模块等。对测试仪一次运行得到的数据文件进行解析分离、分析运算和作图显示。结构框图如图5所示。
- 基于PC104的通用自动测试系统设计(02-23)
- 基于PC104架构的某系列计算机通用测试平台的设计与实现(03-20)
- 多总线融合式通用自动测试系统设计(05-11)
- 一种高可靠性的频率测量系统(03-01)
- 基于PC104的放线车检测系统硬件设计(04-24)
- 于PC104与C8051F120的水下机器人环境监测系统设计(10-22)