亚像素边缘检测在小模数齿轮参数检测中的应用
的阈值选取方法。其基本思想是:假设图像像素数为N,灰度变化范围为[0,L-1],对应灰度级i的像素数Ni为几率为: 以阈值T为基准,把图像的像素按灰度值划分为两类C0及C1,其中C0的灰度值低于T,即在[0,T]之间的像素组成;其中C1的灰度值低于T,即在[T+1,L-1]之间的像素组成。 考虑到像素灰度的分布几率,整幅图像的均值为: 让T在[0,L-1]范围内依次取值,使得 实验结果及分析 本文中以小模数塑料齿轮图像为原型,通过实验比较本文算法与传统Canny算子所做检测结果,且以专业检测仪器所测结果对比。 由图(b)与图(c)、图(e)与图(d)可看出,亚像素边缘更清晰,定位精度也更高,优于传统的边缘检测算法。 表1、表2为两种算法的数据对比,可见本文算法在精度上有明显的优势。 结论 本文设计了一种亚像素级边缘算法,并与传统边缘检测算子,Canny算了作了实验结果比较,实验结果表明,该方法能精确定位图像边缘,优于传统方法的边缘检测方法,能更好的检测齿轮图像的特征,对齿轮检测有新的进步。 参考文献: [1] 刘洲峰,王鹏飞.基于Canny算子的多尺度小波变换图像边缘检测方法[J].电气自动化,2009,31,(2):63-65



 (13)
(13)
 最大的T值则为Otsu算法的最佳阈值。
最大的T值则为Otsu算法的最佳阈值。 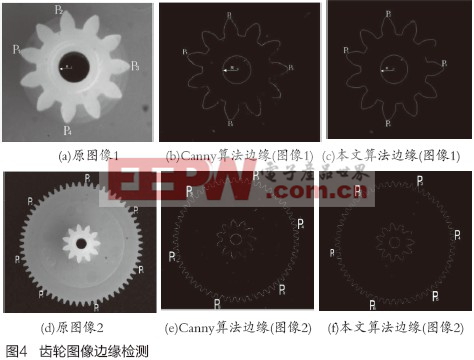

[2] 王文成.基于机器视觉的齿轮参数测量系统设计[J].机械传动,2011,35,(2):41-43
[3] 韦炜.常用图像边缘检测方法及Matlab研究[J].现代电子技术,2011,34,(4):92-94
[4] 张丰收,王飞,崔凤奎,刘建亭.一种基于梯度的亚像素边缘检测算法[J].微电子学与计算机,2011,28,(3):102-106
[5] 孙红艳,张海英.图像边缘检测算法的比较与分析[J].菏泽学院学报,2010,32,(2):49-52
[6] 陈少平,张桂梅,王斯财.基于小波变换和Canny算子的齿轮边缘检测[J].失效分析与预防,2010,5,(4):199-203
[7] 董静,王正勇.Zernike矩结合Sobel算子的边缘检测[J].信息与电子工程,2011,9,(2):202-205
- 便携式发动机测试设备的研究(05-20)
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)
- 基于PCI 总线的高速数据采集系统(09-30)