HIL测试技术在电控单元开发流程中的应用
时间:12-05
来源:互联网
点击:
本文分析了使用HIL测试技术对ECU进行功能性测试的必要性与优势。通过应用实例着重介绍了两种基于HIL的ECU测试类型,即单个ECU功能测试和ECU网络测试,并讨论了HIL在国内的应用与发展。
V模式开发流程
V模式开发流程是现代最重要的开发方法之一,在这套开发流程中大量使用了计算机辅助控制系统设计(CACSD:Computer-Aided Control System Design)。计算机辅助控制系统设计不仅仅是进行控制方案的设计和离线仿真,还包括实时快速控制原型、产品代码生成和硬件在回路的测试(如图1所示)。这是一个完整的流线型的控制系统开发步骤。
在上述环节中硬件在回路(HIL)测试中承担了重要的任务,其实质是一套与电子控制器真实连接的测试系统,用于检测汽车电子控制器大部分功能性故障。
由于总线技术的发展与成熟,现在汽车已经通过网络实现分布式控制功能。而各个ECU之间的交互作用增加,例如共享传感器、计算信息和执行器等。同时,网络支持多种总线系统(CAN、LIN、MOST、FlexRay),并且对于大多数的整车厂或系统供应商而言,网络中的ECU大部分由不同的厂商提供,这些又都可能成为潜在错误来源(存在产品召回的风险)。
综上所述,由于汽车技术的迅速发展,电控单元(ECU)的复杂程度快速增加,控制算法与功能不断增强,对整车而言还集成了各种总线通信功能、在线故障诊断(OBD)等功能。传统的检测方法面对复杂的测试需求开始显得力不从心,而在国外各大汽车厂商流行的HIL测试环节中,HIL设备正逐步满足更复杂的测试需求。
一、两种主要的基于HIL的ECU测试类型
1、单个ECU功能测试
一个ECU开发完成后,必须对其功能进行全面的测试。现在由于控制系统所完成功能的日渐复杂性,对其进行全面综合的测试,特别是故障情况和极限条件下的测试就显得尤为重要。如果用实际的控制对象进行测试,很多情况是无法实现的,或要付出高昂的代价;但如果用计算机辅助设计工具对被控对象进行实时仿真,就可以进行各种条件下的测试,特别是故障和极限条件下的测试。
对单个ECU的功能测试包括软件功能集成测试和验收与发布测试。图2显示了利用HIL环境对变速箱ECU(TCU)进行的功能测试。在HIL测试环境的搭建中,我们使用dSPACE的实时控制仿真平台作为实时环境的硬件载体,在MATLAB/SIMULINK中来建立变速箱模型、液力变矩器模型、发动机模型、整车底盘模型以及路面模型等被控对象模型。在通过MATLAB产品家族中的自动代码生成工具(RTW)将上述模型转化为实时代码下载至模拟器设备中的处理器板卡后,即可完成HIL测试环境的搭建。
在上述过程中,通过信号调理模块或外围驱动电路模块,模拟器还可以集成一些传感器或执行器,所以对于一些关键部件模型我们可以采用真实部件取代,例如手柄部件油门踏板,刹车踏板等。同时,可通过模拟器的标准硬件集成相应的诊断或标定工具。
对于功能测试,我们可以通过操作车辆模型模拟平稳加速状态、急加速急减速状态、坡道状态、软件故障状态,甚至一些在现实中很难出现的极端行驶状态,从而测试和评估TCU的控制效果。另外,还可通过模拟器的故障注入单元模拟大量的硬件故障,如传感器输入的开路、短路等,进一步检测TCU的诊断功能。模拟器与TCU之间的接口如图3所示。
2、测试ECU网络、节点分布式功能
ECU网络测试包括网络中各ECU的“相互作用”,如总线上的相互行为、网络管理、功率消耗、系统集成等。目前,大多汽车中集成了诊断与标定、动力传动控制、底盘控制(ABS、ESP、ASR)、安全气囊、车身电子控制、座位调节、电动后视镜、汽车导航、汽车娱乐媒体等功能,这使得网络功能更复杂、更强大。各个ECU必须基于总线技术(如CAN总线)进行信息传递,资源共享。如图4所示,整个汽车网络可以分为3类速率不同的网络。同一速率的网络中每个ECU有控制信号通信,不同速率的网络中的ECU也有通信,整个网络中所有ECU形成一个整体,互相影响,一个ECU的功能出错会影响其他ECU的工作,甚至会引起整个网络的崩溃。
V模式开发流程
V模式开发流程是现代最重要的开发方法之一,在这套开发流程中大量使用了计算机辅助控制系统设计(CACSD:Computer-Aided Control System Design)。计算机辅助控制系统设计不仅仅是进行控制方案的设计和离线仿真,还包括实时快速控制原型、产品代码生成和硬件在回路的测试(如图1所示)。这是一个完整的流线型的控制系统开发步骤。

图1 V模式的开发流程
在上述环节中硬件在回路(HIL)测试中承担了重要的任务,其实质是一套与电子控制器真实连接的测试系统,用于检测汽车电子控制器大部分功能性故障。
由于总线技术的发展与成熟,现在汽车已经通过网络实现分布式控制功能。而各个ECU之间的交互作用增加,例如共享传感器、计算信息和执行器等。同时,网络支持多种总线系统(CAN、LIN、MOST、FlexRay),并且对于大多数的整车厂或系统供应商而言,网络中的ECU大部分由不同的厂商提供,这些又都可能成为潜在错误来源(存在产品召回的风险)。
综上所述,由于汽车技术的迅速发展,电控单元(ECU)的复杂程度快速增加,控制算法与功能不断增强,对整车而言还集成了各种总线通信功能、在线故障诊断(OBD)等功能。传统的检测方法面对复杂的测试需求开始显得力不从心,而在国外各大汽车厂商流行的HIL测试环节中,HIL设备正逐步满足更复杂的测试需求。
一、两种主要的基于HIL的ECU测试类型
1、单个ECU功能测试
一个ECU开发完成后,必须对其功能进行全面的测试。现在由于控制系统所完成功能的日渐复杂性,对其进行全面综合的测试,特别是故障情况和极限条件下的测试就显得尤为重要。如果用实际的控制对象进行测试,很多情况是无法实现的,或要付出高昂的代价;但如果用计算机辅助设计工具对被控对象进行实时仿真,就可以进行各种条件下的测试,特别是故障和极限条件下的测试。
对单个ECU的功能测试包括软件功能集成测试和验收与发布测试。图2显示了利用HIL环境对变速箱ECU(TCU)进行的功能测试。在HIL测试环境的搭建中,我们使用dSPACE的实时控制仿真平台作为实时环境的硬件载体,在MATLAB/SIMULINK中来建立变速箱模型、液力变矩器模型、发动机模型、整车底盘模型以及路面模型等被控对象模型。在通过MATLAB产品家族中的自动代码生成工具(RTW)将上述模型转化为实时代码下载至模拟器设备中的处理器板卡后,即可完成HIL测试环境的搭建。
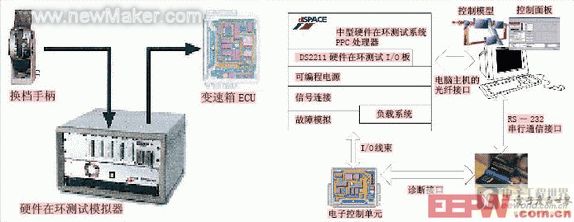
图2 变速箱ECU开发的HIL测试
在上述过程中,通过信号调理模块或外围驱动电路模块,模拟器还可以集成一些传感器或执行器,所以对于一些关键部件模型我们可以采用真实部件取代,例如手柄部件油门踏板,刹车踏板等。同时,可通过模拟器的标准硬件集成相应的诊断或标定工具。
对于功能测试,我们可以通过操作车辆模型模拟平稳加速状态、急加速急减速状态、坡道状态、软件故障状态,甚至一些在现实中很难出现的极端行驶状态,从而测试和评估TCU的控制效果。另外,还可通过模拟器的故障注入单元模拟大量的硬件故障,如传感器输入的开路、短路等,进一步检测TCU的诊断功能。模拟器与TCU之间的接口如图3所示。
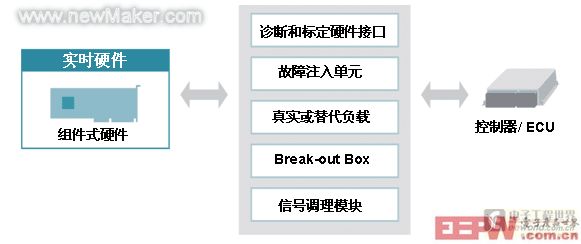
图3 模拟器与控制器的接口
2、测试ECU网络、节点分布式功能
ECU网络测试包括网络中各ECU的“相互作用”,如总线上的相互行为、网络管理、功率消耗、系统集成等。目前,大多汽车中集成了诊断与标定、动力传动控制、底盘控制(ABS、ESP、ASR)、安全气囊、车身电子控制、座位调节、电动后视镜、汽车导航、汽车娱乐媒体等功能,这使得网络功能更复杂、更强大。各个ECU必须基于总线技术(如CAN总线)进行信息传递,资源共享。如图4所示,整个汽车网络可以分为3类速率不同的网络。同一速率的网络中每个ECU有控制信号通信,不同速率的网络中的ECU也有通信,整个网络中所有ECU形成一个整体,互相影响,一个ECU的功能出错会影响其他ECU的工作,甚至会引起整个网络的崩溃。
- 基于Hilbert变换的电压凹陷检测方法(06-20)
- 选择硬件在环(HIL)测试系统I/O接口(06-12)
- 基于NI VeriStand和JMAG-RT进行高性能电机仿真(07-22)
- 在无人机制导、导航与控制中应用半实物仿真(11-24)
- 准确测量便携式设备电池剩余电量的方法(10-24)
- 一种基于NI平台的BMS电池管理系统HIL测试(02-27)