华儒科技:全面解析雷达传感器技术
测范围。
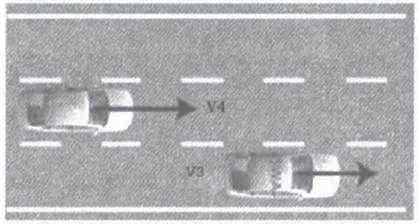
图3
10、雷达测速系统
交通雷达测速设备是一种微波电子测量仪器,这种测量设备是依据多普勒原理及现代电子技术为基础设计的一种多普勒测速雷达,它主要用于公路、铁路及其他需要测速限速的场所。
多普勒效应是指当发射源和接收者之间有相对径向运动时,接收到的信号频率将发生变化。这种现象最先是被奥地利物理学家多普勒在1842年发现的。多普勒提出了"波的频率和波源与观察者之间的相对运动有关"的理论,称之为多普勒原理。应用到雷达电磁波上,当雷达的电磁波在行进的过程中碰到物体时,该雷达波会被反弹,而且其反弹回来的波,其频率及振幅都会随着所碰到的物体的移动状态而改变。若雷达波所碰到的物体是固定不动的,那么所反弹回来的雷达波其频率是不会改变的。
11、雷达测速传感器优点
传统的测速大多以旋转式运动速度测量和直线运动速度测量,但现实工业自动化中有不少非规律性的测速,比如运动员运动测速,交通车辆测速,高尔夫球速测量等情况下,雷达测速传感器可以满足这些要求。
12、倒车雷达
倒车雷达是一种安装在汽车前、后保险杠上的电子侦测系统。采用超声波检测技术。当驾驶汽车前进或倒退以及在狭窄的车位泊车时,通过声音和提示可知车后是否有不明障碍物距离远近,从而辅导驾驶员安全,轻松地倒车,避免碰撞。
结构:
1)、倒车雷达模块
2)、倒车雷达报警显示
3)、倒车雷达传感器
4)、TCM模块(传送档位信息)
5)、ECM模块(传送车速信号)
6)、BCM模块(触发蜂鸣器)
13、原理
工作原理:超声波作为一种特殊声波,同样具有声波传输的基本物理特性,即反射、干涉、衍射、散射。超声波就是利用其反射特性。超声波发射器不断的发射出40KHz超声波,遇到障碍物后反射回反射波,超声波接收器接收到反射信号,并将其转换为电信号,测出发射与接收到反射波的时间差t,即可求出距离。
s=1/2ct其中c为超声波音速。由于超声波也是声波,所以与温度有关。
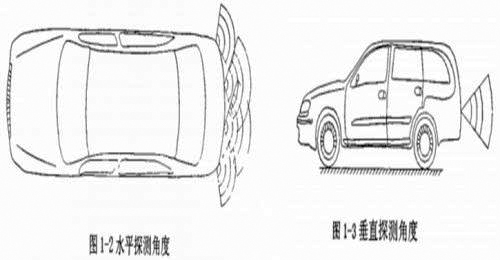
图4
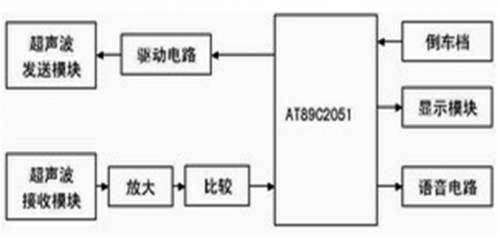
图5
14、自动泊车系统
通常的泊车辅助系统是通过安装倒车雷达或后视影像系统,在泊车时给司机起到提示作用,以避免碰撞。而自动泊车系统的基本功能是能够控制车辆自动完成泊车,在此过程中可以不需要司机的干预。这样一种系统可以有效解决了新手司机泊车的烦恼,提高了车辆的智能化水平。
15、自动泊车系统的基因组成
1)、传感器系统。主要用来探测环境信息,寻找车位并实时反馈车辆位置信息。
2)、中央控制系统。主要用来处理环境感知信息,并在线实时计算目标车位参数和车辆相对位置,判断可行性并确定自动泊车策略。
3)、执行系统。主要根据中央控制系统的决策信息,控制方向盘和动力系统,忠实地按照决策路径控制车辆运动到泊车位。
16、自动泊车系统运行的基本过程
1)、通过传感器系统感知环境信息
2)、根据传感器系统的信息得出有效车位信息、车辆相对位置,从而决策泊车初始位置
3)、电子控制单元(Electronic Control Unit,简称ECU)根据传感器信息,实时进行环境建模,生成车辆运动路径,控制车辆无碰撞地自动运动到泊车位。
17、研究方法
1)、基于路径规划方法的研究
路径规划方法通过生成既定路径控制车辆的运动轨迹。这种方法依赖于控制器的精确性,控制效果并非完全可靠。在泊车过程中,即使位置误差能够被后来的运动所补偿,也会增加相应的时间成本,从而影响自动泊车的效果。
2)、基于经验方法的研究
采用智能控制算法对自动泊车问题进行研究。以模糊控制方法为例,在获得小车的方向角后,基于小车相对泊车位置的纵向和横向距离,对不同的泊车位置,不同的泊车阶段会产生不同的模糊规则。模糊控制会在每一个采样周期,根据小车相对于泊车位置的相对位姿,产生一个控制命令,可以有效补偿系统误差。
18、传感器选择
自动泊车系统需要利用各种传感器,获得车辆的车身偏向角、转向角度、速度、位移、障碍物形状及位置等信息。显然,所知信息越多,控制难度越小。事实上,目前的传感器技术并不能完全提供以上信息,而且有的物理量,实时准确地获取其数值所需付出的代价较大,而它们对于控制过程的价值却不大。选择方案如下:
1)、选择超声波传感器以测量车辆与障碍物的距离,同时可实现停车位检测;
2)、选择增量式编码器作为车辆位移和速度的测量工具;
3)、车辆转向角度可使用绝对式编码器测量方向盘转向角而获得,在实验平台上则使用滑动变阻器作为转向角度的测量工具。
这种方案的优点是:成本较低,技术成熟。超声波传感器已广泛应用于倒车辅助系统;编码器在工程领域上,被广泛用于位移
- Tesla前向77GHz防撞雷达黑科技破解(09-13)
- 雷达在汽车主动安全系统中的应用知识介绍(12-03)
- 毫米波汽车防碰撞雷达技术原理及研发进展(12-14)
- 超宽带雷达信号电路的设计与实现(10-18)
- 汽车防撞雷达系统功率放大器仿真设计(01-30)
- 车用毫米波雷达传感器组网技术研究(11-16)