基于LDC1000电感到数字转换器的金属探测器
LDC1000是世界首款电感到数字转换器。只需外接一个PCB线圈或者自制线圈就可实现非接触式电感检测,而且可以测试外部金属物体与线圈的空间位置关系。检测原理是利用大学物理中的电磁感应原理。在印刷电路板线圈或自制的线圈中加一个交变电流,其线圈的周围就会产生交变电磁场,此时如果有金属物体处于这个电磁场中,则会在金属物体表面产生感应电流,感应电流的大小是线圈与金属物的距离,大小、成分的函数。利用这个特性配以外部设计的金属物体可以方便实现水平或垂直距离、位移、振动的测量,可广泛应用于相关领域。
LDC1000是通过调节振动器的幅度同时检测LC的谐振损耗来实现阻抗和谐振频率的测量。通过检测注入LC谐振单元的能量计算出Rp(等效并联电阻),转换为数字量,其数值和Rp的值成反比。
LDC1000支持宽范围的LC组合5 kHz到5 MHz谐振频率,Rp的范围支持798 Ω到3.93 MΩ,此范围即为器件内部ADC的信号范围,确定其分辨率。等效并联电阻Rp与ADC码值成反比,当金属物体离线圈最近的时候涡流最大,损耗也最大。
1 系统构成
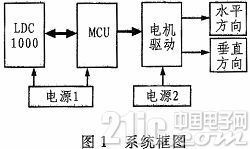
早期金属探测系统以8位51系列单片机作为控制核心,其硬件电路大体分为2部分,一部分为线圈振荡电路,一般包括:多谐振荡电路、放大电路和探测线圈;另一部分为控制电路,包括:霍尔元件、可编程放大电路、峰值检波电路、模数转换器、单片机、LED显示电路、声音报警电路及电源电路等。由于系统复杂,精确度经常达不到,而LDC1000评估板中集成了振荡电路、检测电路、模数转换器、寄存器等,使用起来就方便很多,减少了很多不可控的调试环节,系统构成比较简单,测试精度提高。如图1所示。
2 总体设计方案
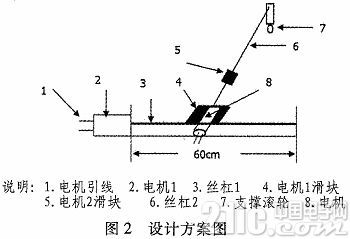
利用LDC1000可将测量量变换为距离的特点,可将其放置在一个能够自主移动的设备上,就可以完成一定范围内金属物体的探测。自主设备需完成自动定位功能,即将LDC1 000所获得的数据进行对比处理后输出,控制自主设备的电机运转,而最终停止在金属物的附近或上方。本设计整体方案采用TI公司的MSP430微处理器作为控制器与之通过SPI口连接,通过读取LDC1000的固定寄存器获得相关数据经处理后驱动电机在50 cm*50 cm平面内移动寻迹,如图2所示。
3 硬件构成
3.1 控制器
德州仪器的MSP430系列是一种超低功耗微控制器系列,采用16位的体系结构,16位的CPU集成寄存器和常数发生器,典型应用为传感器系统。MSP430-14系列内置16位定时器,12位A/D转换器,UART、SPI等。本设计中采用MSP430F149,通过SPI口与LDC1000连接。
3.2 与LDC1000的连接
LDC1000与MSP430f149的连接采用四线制SPI连接方式,通过SPI串行总线实现对LDC1000的控制,完成时序定义和数据读取,在此通信过程中,LDC1000为从机(Slave)。MSP4 30f149其中引脚p3.0接LDC1000的CSB;P3.1接SDO;P3.2接SDI;P3.3接SCLK。
3.3 移动的实现
处理器输出信号通过H桥驱动电路,完成电机1(X轴)和电机2(Y轴)的控制。根据电机负载,选择不同的驱动晶体管,本设计中使用8 050和8 550对管实现,采用+12 V直流电驱动。测试中电机运转正常,控制较为灵敏。通过对设计要求分析,在规定的时间内完成场内任意点的查询,选择减速直流电机(80 r/min)。
为保证整个探测区域,采用X—Y轴系统完成,电机1驱动滑块完成X轴运动(如图2所示),电机2固定在电机1的滑块上,完成Y轴的运动,再将主控制器固定在滑块2上,LDC-1000传感器则尽量与玻璃平面靠近,采集相应数据。显示部分采用LCD12864,可以将相应寄存器数据显示以便观察。当找到金属物体时系统通过指示灯和蜂鸣器报警提示。
4 软件实现
4.1 思路与流程
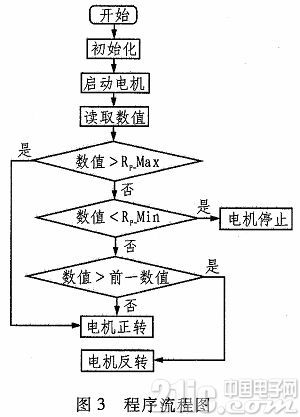
启动后,先对LDC1000中特殊寄存器赋值,即设定上限和下限,并留出冗余,然后启动滑块移动传感器,在所经过的地方对对Rp相应寄存器的数据读出并进行数据的比较,去发现数值的变化情况,以此方式来逐次逼近金属物,从而最终停止在金属物附近或上方。程序执行过程如图3所示。
4.2 程序实现
LDC1000中的寄存器地址已在其头文件LDC1000_cmd.h中定义,编程时将其包含即可。在数据处理中,用户关心的Rp和Frequency值,Rp可推算出金属的距离,利用Rp值的变化完成金属物的定位。Rp占用2个寄存器,可通过保持片选信号有效,进行连续读写,此时寄存器地址自动增加。
初始化程序:
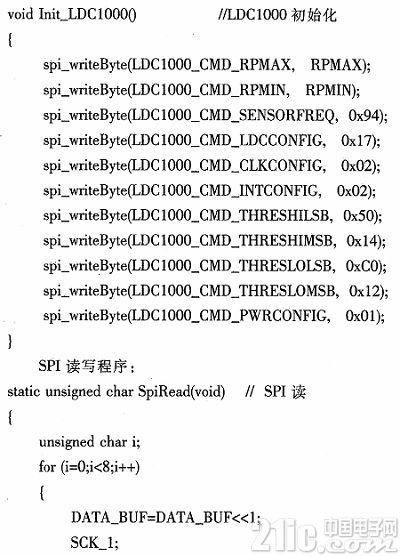
对函数进行调用时,函数参数值的选定应根据LDC1000的SPI通信协议。在主机与从机通讯时遵循以下步骤:片选信号置零;MSP430通过SDI线向LDC1000写入访问寄存器地
址,其中最高位0表示写入,1表示读出,剩余7位为寄存器的地址。
4.3 传感器数据读取
不同
艾研LDC1000 电涡流传感器 金属探测器 MSP430 相关文章:
- 金属探测器的分类及作用(01-04)
- 金属探测器的前世今生(01-04)
- 手持金属探测器常见六大故障分析(01-04)
- 金属探测器安检门能检测到哪些东西?(12-30)
- 手持金属探测器故障排除方法(02-18)
- 巧用收音机作金属探测器(07-23)