北斗导航芯片UM220+ZigBee的无线终端设计
时间:10-18
来源:互联网
点击:
定位误差较小,符合应用要求。
3.2 时间同步误差测试
在时间同步的仿真中,依然采用间接定位测试中的节点。23个节点位置随机分布,时间同步周期为5 s,在原有ZigBee协议中增加了部分模块的功能,包括MAC层的时间戳。在实验中,分别记录了FTSP在网络中节点间单跳和多跳的平均同步误差,测试次数为10次,实验结果如
图6所示。
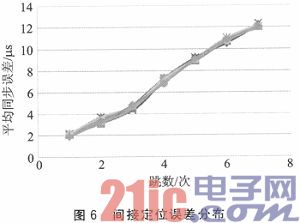
根据实验结果,两个节点单跳FTSP平均误差为2.12μs;但是到7跳的时候,两个节点的平均误差,FTSP为11.97 μs,结果表明,FTSP算法在多跳网络中的同步误差精度较高,曲线平滑,符合要求,可以达到提升ZigBee网络时间同步准确性的目的。
结语
利用Freescale的ZigBee通信模块MC13213与和芯星通UM220定位导航芯片组合搭建的硬件和软件平台,把北斗卫星定位系统的定位信息和授时功能与ZigBee系统相结合;利用精确的定位和授时数据改进ZigBee协议栈的性能,增强其节点的功能,实现了精确定位、间接定位和全网时间同步的改进。通过ZigBee网络传输性能的优势,弥补了单一北斗导航数据缺乏流动性和数据形态孤立的不足。经测试,设计终端性能稳定,效果良好,达到了预期的设计目标。
- 电子电度表设计方案(03-25)
- 基于CC2530的Zigbee网络节点设计(04-11)
- 基于ZigBee技术的环境监测系统的开发(09-30)
- 基于CC2480的土壤温度和水分梯度测量系统(10-04)
- 关于GPRS技术的远程智能抄表系统的研究(01-28)
- 基于ZigBee的多用户智能电表设计(02-15)