基于零频抑制与杂波图的地面慢速目标检测
其中,0≤k≤N-1表示滤波器组的组号。Kalmus滤波器本质是将DFT滤波器组中的相邻两个滤波器相减以获得深的凹口,然后通过频域搬移使凹口落在零频。由此可得到Kalmus滤波器的幅频响应,如图3所示。

按照上述方式,两个滤波器的系数可以设计为

其中,N代表滤波器阶数,且0≤n≤N,w(n)为长度为N的窗函数。此外,Kalmus滤波器存在一定旁k,可通过窗函数法进行加权抑制。
4 改进的杂波图检测
普通杂波图对慢速目标检测,通常面临不连续的问题。这是由于杂波图更新频率过快,与目标通过距离单元的时间不匹配造成的。假定雷达系统的距离单元大小为L,慢速目标以速度v通过距离单元的时间为t=L/v。假定杂波图更新频率远小于t,则在t时间内目标一直位于该距离单元内。杂波图积累将多次采用目标能量,造成杂波背景估计偏差。最终对目标的检测结果,表现为数次检测后目标消失;而目标运动至下一单元后,又将重复这一过程。
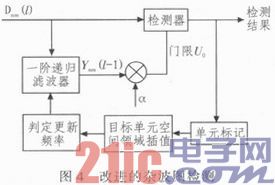
杂波图检测的改进包括以下方面:1)杂波图更新频率可设,使其与距离单元通过时间匹配。2)检测后标记目标和背景单元,目标单元不参与杂波积累。3)采用邻域的背景单元插值计算目标单元背景,即空间邻域插值。改进的方法框图如图4所示。
5 仿真实验
5.1 Kalmus滤波器性能仿真
为设计性能适用的零频抑制滤波器,对不同阶数下Kalmus滤波器的半功率点位置进行了仿真实验。

图5为半功率点起点和终点位置随阶数的变化曲线,所加窗为Hanning窗。滤波器半功率点起点位置随着阶数增加减小,但高阶滤波器起点位置减小不再明显。本文采用8或16阶。另外,加窗抑制旁k也在一定程度上增加了通带范围。
5.2 慢速目标检测仿真
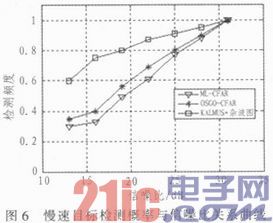
通过模拟强杂波环境下的慢速目标检测过程,验证检测性能。其中,模拟杂波高于系统噪声60 dB,目标运动速度0.5m/s,信噪比变化13-30 dB。图6为不同方法下统计慢速目标检测概率随信噪比的变化曲线。可以看到,基于零频抑制与杂波图的地面慢速目标检测,性能明显优于其他方法。
6 结束语
慢速目标检测是地面雷达系统中的技术难点。杂波抑制和目标检测方法相结合的设计方式,提供了较好技术途径。基于零频抑制与杂波图的地面慢速目标检测方法,在杂波抑制和目标检测两方面进行了改进,其检测概率改善明显。该方法对提高地面雷达性能具有参考意义。
地面慢速目标 杂波抑制 杂波图 Kalmus滤波器 相关文章:
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)
- 基于PCI 总线的高速数据采集系统(09-30)
- 泰克全新VM6000视频测试仪助力数字电视等产品测试 (10-06)