常见公交车辆检测技术案例分析
车辆的路线和终点站等信息便可以通过声讯系统告知盲人。
目前国内很多城市的公交优先系统、公交到离站信息管理系统以及不停车收费系统(Electronic Toll Collection,ETC)均使用了RFID技术。但是,国内在RFID的标准化方面还有待深入和完善,以便被更多的企业所接受,使不同生产商的生产系统及模块的替代性更好,使RFID的应用更为普及。
2.4视频检测
视频检测方式也是智能交通系统先进的监控和检测技术之一,视频检测器可以大范围的对公交车辆进行检测和识别。视频检测的基本原理是对摄像机得到的图像进行计算机处理,进而对视频中的运动物体进行检测。
视频车辆检测器主要由外场摄像机、数据传输设备和视频处理器组成。外场摄像机将道路上的交通视频图像拍摄下来,经数据传输设备传给视频处理器。视频处理器通过相应的算法检测得到车辆的速度和数量。视频处理方法主要包括虚拟线圈法和特征识别法。
虚拟线圈法是指通过相应程序在交通图像上设置虚拟线圈和粗线条,作为速度检测器和计数检测器,如图3所示。
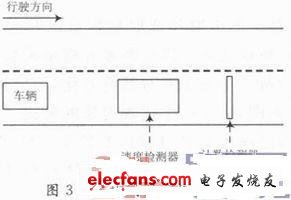
虚拟线圈的尺寸、位置和数量可以根据具体的道路情况进行调整。当车辆通过虚拟线圈和计数检测器时,会产生检测信号,经过视频处理软件的分析和处理,可得到车速、流量等参数。
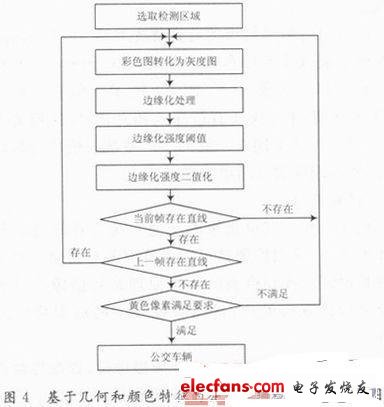
基于特征识别的公交车辆检测方法主要包括基于几何和颜色特征、基于车型特征等方法。
基于几何和颜色特征的公交车辆检测的基本思想为:公交车辆的车牌一般为黄底黑字,且公交车辆的车体都比较大,有别于其他机动车辆的车身特征,因此,可以选择其中一种特征结合车牌颜色做公交车辆的识别检测算法。以公交车的保险杠和黄色车牌为例,其检测算法的流程图如图4所示。这种方法的应用有一定的局限性,在公交车场站等一些公交车辆集中、车型单一的场所,此方法的精确度较高;但是此方法不能判别大货车和公交车区别,因此在道路中的公交车辆的检测过程中,该方法有待改善。
基于车型特征的公交车辆识别算法主要应用的是模式识别的方法,其框架图如图5所示。

其中,特征的提取和选取是指对研究对象固有的、本质的主要特征或属性进行测量并将结果数值化,或对目标进行分解产生基元并对其符号化,形成特征矢量或符号串、关系图,从而产生代表对象的模式。另外,在进行特征提取之前还需要对目标的信息载体进行必要的预处理。目前常用的特征识别方法包括Haar特征、 HOG特征等。
为了有效地让机器具有分类识别功能,首先对它进行训练,产生分类识别的规则和分析程序,这也相当于机器进行学习。这个过程一般要反复进行多次,不断地修正错误,改进不足,最后使系统正确识别率达到设计要求。目前,机器的学习常需要人工干预,这个过程通常是人机交互的。
视频检测器安装调试方便,对路面和土木设施不产生破坏,但是虚拟线圈检测器的位置是固定的,如果视频检测器的位置调整,程序则无法准确的进行检测。同时,此方式需要对检测道路进行虚拟线圈预设置,在实际的使用过程中步骤较繁琐,没有良好的移植性。并且此方法存在公交车辆漏检或错检的现象,因此在实际工程中此方法还有待完善。
基于车型特征的公交车辆识别算法在实际应用过程中也会存在一定的漏检或错检现象,且对分类器的训练效果要求较高,同时由于特征点的提取和匹配需要一定的时间,因此,此方法在应用时对检测准确度和实时性的要求较高。
文献采用车载卡与通信基站信息交互的公交车辆识别方法。在主要站点或加油站附近指定的STD电话亭或加油站安装信号检测装置;同时,公交车辆安装车载卡。车载卡中含有的信息通过声讯系统后转化为本地电话号码,通过网站邮件更新的方式将更新的信息发送到终端中转站。从而实现公交车辆跟踪。
这种方法会涉及到较多的人为因素干预,因此,这种方法仅适用于小范围的车辆跟踪系统,对大范围的实时车辆跟踪效果不理想。
2.5近红外辐射光流检测公交车辆
提出了利用近红外辐射技术,通过光流检测器检测道路上的公交车辆。车辆检测器安装在高处,连续不断的向道路上发射近红外光,通过光线反射回发射器的时间长度判别车型。
近红外发射机根据按照一定信号发射光线,光线接收器接收反射光线,并把反射光线输入到光流路径差比较电路中。反射信号的阻抗元件会因光流路径差的不同而变化,发射机的信号作为光流路径差的参考信号输入到发射机。通过路径差比较电路中阻抗元件的变化识别公交车辆。
3 常用检测方式比较
几种常用的检测方式及应用环境如表1所示。
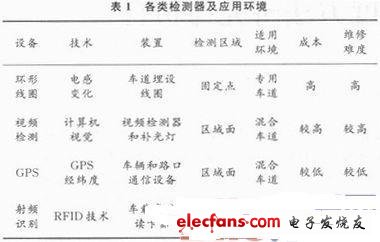
环形线圈检测能够精准地确定出交通信号控制系统中道路占有率、车辆行驶速度和车间距等重
公交车辆检测技 相关文章:
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)
- 基于PCI 总线的高速数据采集系统(09-30)
- 泰克全新VM6000视频测试仪助力数字电视等产品测试 (10-06)