浅谈数字化宽带测向系统中的相位差测量及误差
在电子对抗领域中辐射源测向是一个基本问题。能发射电离辐射的物质或装置。从广义上讲,凡能释放各种电离辐射的物质或装置(如宇宙射线)均可视为辐射源。但习惯上用于γ探伤、放射治疗和辐射加工等的放射性深度较高的放射源称为辐射源。干涉仪测向体制的主要优点是精度高和工作频率范围宽,但目前使用的干涉仪系统还存在不足,主要包括:(1)在被动制导等领域中测向精度仍然不够:(2)对现代雷达使用的宽带脉压信号适应能力有限;(3)有待进一步提高系统的工作频率范围。针对上述问题,本系列论文提出了数字化宽带测向系统的整体解决方案,重点讨论数字化相位差测量及误差分析、概率解模糊算法和在测向精度和工作频率范围约束下如何进行天线阵列基线设计三个问题。
本文是系列论文的第一篇,给出了数字化宽带测向系统模型,讨论了数字化相位差测量方法,推导了数字化相位测量的数字化方法误差函数和由通道噪声引起的信号相位误差分布密度函数。相位差测量的精度直接影响系统测向的精度,还会影响解相位差模糊和天线阵列基线设置等一系列系统设计问题。传统的相位差测量方法都是利用窄带信号干涉原理把相位差转化为幅度进行测量的,因而其只能够适用于窄带信号的相位差测量,且测量精度受幅度测量误差的影响较大。本文提出的数字化相位差测量方法,其基本思想是把信号转换到频率域,利用信号的相位谱直接完成在给定频率点上相位差的测量,且全面的分析了相位差测量误差。
1 数字化宽带测向系统模型
数字化就是将许多复杂多变的信息转变为可以度量的数字、数据,再以这些数字、数据建立起适当的数字化模型,把它们转变为一系列二进制代码,引入计算机内部,进行统一处理,这就是数字化的基本过程。解释二:数字化将任何连续变化的输入如图画的线条或声音信号转化为一串分离的单元,在计算机中用0和1表示。通常用模数转换器执行这个转换。当今时代是信息化时代,而信息的数字化也越来越为研究人员所重视。早在40年代,香农证明了采样定理,即在一定条件下,用离散的序列可以完全代表一个连续函数。就实质而言,采样定理为数字化技术奠定了重要基础。英文digit译成“数字”是大陆的译法。最开始是不是由原信产部的研究所科研人员这样译出,尚不可考,愿有心有力者相助查寻。
非均匀线阵的天线数为m,天线的间距分别为d1,d2,L dm-1宽带入射信号分别为s(t),入射方向与阵列法线的交角分别为θ。
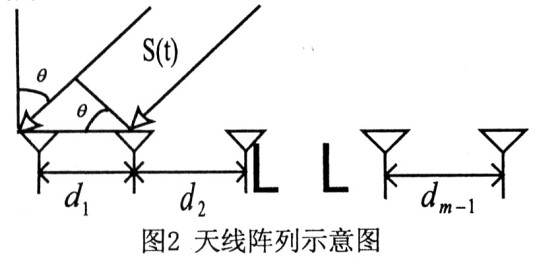

其中τ信号在第i个天线上相对于第O个天线的时间延迟,c是光速常数,di(l=1,2,L,m一1)为天线间距。对式(2)两边同做傅立叶变换:
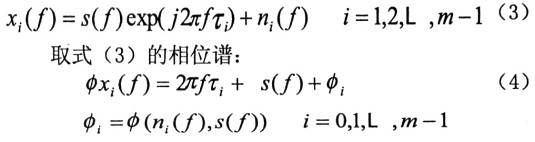
式(4)中φs(f)表示信号s的相位谱;φi为由噪声谱对信号相位谱影响产生的误差。作如下的相位差变换:

式(6)中相位差△φxi(f)是无模糊的相位差。然而实际中由于天线阵列的间距大于半波长因而相位差是有模糊的。
不妨令:

式中bi是有模糊的相位差,ni表示模糊整数,ai为相对基线长度,ei为相位差误差。则式(6)可代换为:

这是数字化宽带测向系统模型。
以下的工作都是围绕这个模型展开。其一是如何测量相位差bi(i=1,2,L,m一1) 及推导相位差测量误差ei(i=l,2,L,m一1)的分布密度函数。其二是如何快速求解模糊整数ni(i=1,2,L,m一1),即快速解模糊问题,这将在第二篇论文中讨论。其三是如何求解x的最优估计值从而获得测向角θ=arcsin(x),并进行测向角测量误差分析;同时还会讨论如何进行天线阵列的设计问题。
2 数字化相位差测量及数字化方法误差
不妨设两个通道的时延为τ,信号为△t,信号持续时间为s(t),采样间隔为N,采样点数为T。


式(14)即为相位差测量的数字化方法误差函数。

从图3中可以看出:在f=1/4,即采样频率是所测频率的4倍时,相位差最大误差约为40;当采样频率是所测频率的20倍时,方法误差可以忽略。
3通道高斯白噪声引起的信号相位误差设通道噪声是高斯白噪声N(O,σ2),采样点数为N。则有:(1)其在离散傅立叶变换序列的实部序列和虚部序列是独立同分布的高斯白噪声序列(证明略)。(2)噪声的幅度谱服从瑞利分布,相位谱服从均匀分布(证明略)。(3)噪声对信号相位谱的影响。
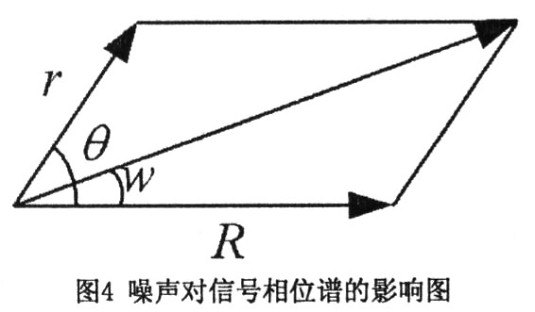
图4中,R为信号频谱幅度值,r,θ为噪声频谱幅度值和相角,w为噪声引起的信号相位误差。
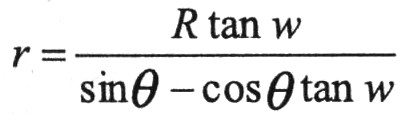
令θ’=θ,则有:
设噪声的归一化带宽为B,信号的幅度一致性系数为ρ,白噪声功率为σ2,信噪比为SN,则计算噪声对信号的相位谱的影响关系。其
数字化宽带测向系统相位差测量误 相关文章:
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)
- 基于PCI 总线的高速数据采集系统(09-30)
- 泰克全新VM6000视频测试仪助力数字电视等产品测试 (10-06)