基于虚拟仪器的停车场车位检测引导系统
器以及共阴极数码管组成。
超声波车位探测器的车位信息由P1口接收。例如,如果P1.1为高电平,说明1号车位有车停放,反之,则说明无车停放。P1口为数码管的位选端,高电平有效。P3口的0,1,2管脚为锁存器的片选端。
4 停车场车位检测引导系统的软件实现
采用模块化程序设计思想,对不同功能的程序分别编程。本系统软件主要分为两大部分,一部分是超声波探测器部分的程序,主要有40KHZ方波产生,超声波的发射控制,距离的计算,车位情况的判断以及车位信息的发送。另一部分是车位信息采集及显示部分的程序,有车位信息采集,计算空车位数量,最近车位判断,显示内容。
4.1超声波探测器程序总体流程图
超声波探测器部分的程序主要由超声波发射程序和中断服务程序两部分组成。分别如图4、5所示。
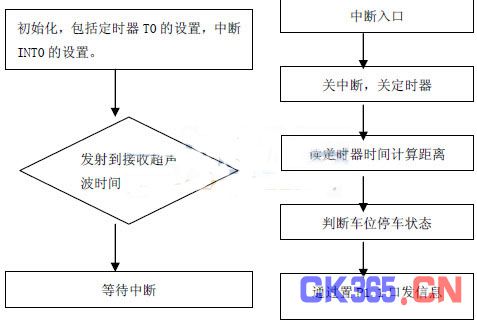
图4 超声波发射程序 图5 中断程序
4.2 车位信息采集及显示部分程序
最近车位判断原理:把车位由近及远按顺序排队,即1号车位最近,8号车位最远。1号车位超声波探测器的信息输出端即P1.1接车位信息采集及显示模块的P1.1,依次接线。车位信息采集及显示模块扫描P1口,第一个低电位的车位即为最近车位。本模型只接了8个车位示意,在实际应用中可通过多路数据选择器等器件方便的扩展。流程图如下图6。

图6 车位信息采集及显示部分程序流程图
4.3 车位监测控制系统的软件管理系统
管理软件系统是整套停车库智能管理系统的核心部分。虽然因停车库功能的不同需求其软件的组成有所不同,但它应该是一套先进的停车库自动化管理程序。它不仅要为建设单位提供一种灵活,有效的管理模式,而且要具备自维护功能和一定的扩展性,以适应将来功能的需要。目前主要是空车位数、最近车位号等,入场引导方式主要是:停车场外入口车位显示屏。如图 7所示。

图 7 车位检测控制系统的管理软件
图 7中的设计采用了 VISA的串行通讯子 VI来开发串行通信软件。VISA库驻留在计算机系统中,完成计算机与仪器之间的连接,用以实现对仪器的程序控制。VISA本身不具有编程能力,它是一个高层次API。通过调用低层驱动程序来实现对仪器的编程。VISA的 I/O控制适用于 VXI仪器、GPIB仪器、RS-232串行仪器等类型。VISA串口子 VI共有 5个串口通信节点,分别是实现寻找设备号、串口初始化、串口写、串口读、检测串口缓存、关闭串行设备的任务或事件功能。程序设计如图 5所示。
首先是对串口的初始化设置:波特率9600,8位数据位,1位停止位,无校验位,串口号为1。当系统启动时,通过 VISA Write向单片机发送“发送请求命令 1”,由于 Labview的串行通信子 VI只允许对字符串难道读写,因此在数据处理时,必须进行字符串与数字的转换,我们采用字符串到数字的转换函数来实现。另外在接到计算机发送来的请求信号后,单片机则回应应答信号3,计算机通过 VISA Read.vi节点读取单片机的应答信号,并且判断是否收到3来控制顺序结构中的While循环,若计算机没有收到单片机的应答信号则重发“发送请求命令”,若收到应答信号则顺序执行下面的程序,即通过 VISA Read.vi节点读取数据。最后对取得的数据进行处理、显示。
5、总结
该系统经过多次实验测试,能够实现距离检测准确,车位信息判断无误, 从所采用的器件的价格来看,该系统成本较低, 在实际安装时也较为方便。在测量范围满足实际室内停车场的要求后, 将车位检测器一方面与单片机先连,通过单片机内部处理、显示;另一方面与停车场内的总线接口相连,通过总线传输给中央控制器,由虚拟仪器LABVIEW软件进行处理,实现对停车场的智能化管理。
本系统的测距误差主要来源于以下几方面:
(1) 超声波束对探测目标的入射角的影响。
(2) 超声波回波的声强与待测距离的远近有直接关系, 因此,测距误差也与待测距离有关。
(3) 超声波传播速度对测距的影响。稳定准确的超声波传播速度是保证测量精度的必要条件。对于测距而言, 引起声速变化的主要原因是媒质温度的变化。本系统硬件上没有温度检测功能, 不能进行温度补偿。若采用温度检测和声速预置的方法对声速进行修正, 可以有效地消除温度变化对测距精度的影响。
本文作者创新点是:采用超声波探测车位状态,利用虚拟仪器实现监控,使系统具有成本低、硬件结构简单、工作可靠等特点。它不仅可用于汽车停车泊位, 还可以用于其它检测系统中。
虚拟仪器停车场车位检测引导系 相关文章:
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)
- 基于PCI 总线的高速数据采集系统(09-30)
- 泰克全新VM6000视频测试仪助力数字电视等产品测试 (10-06)