汽车雷达传感器组网技术研究
同的频率,当发射机频率捷变时,接收机本振要作相应的变化,即要实现频率上的同步。汽车雷达网络对传感器之间的时间同步控制误差要求在10ns内。所以高精度时间频率同步系统是汽车雷达传感器组网的关键技术。图4给出了基于DDS同步时钟源的配置,各个收发单元上的DDS同步时钟源的参考频率源应采用高稳定度的原子钟(如铷、铯原子钟)。各收发单元的原子钟要定期的用同一时间基准来校准。用作校准的时间基准的精度要更高一些,它们可以是GPS(导航星全球定位系统),罗兰C或彩色电视发射台发射的时间基准信号。
3.3、汽车雷达网络的目标分类算法
目标分类系统的主要任务是针对目标回波信号特征计算给定向量的分类关系,分类器定义了一组不同的目标类别。分类器的工作可以分为研究阶段和分类阶段,在研究阶段分类器对若干特征和经过独立标记的特征向量进行自动分析;在分类阶段,要对每个被检测到的目标生成特征向量。与此同时,识别算法采用最大似然方法进行判决,以判别特征向量属于哪个类,如图5所示。在汽车应用中,由于分类任务很复杂,通常一个给定的向量需要考虑几个特征,因而要采用多个分类器,其优点是在研究阶段能够在一次迭代过程中评估某个特征对决策过程的影响,并自动剔除对决策过程影响较小的项目。文献[4]给出了基于汽车雷达传感器的目标分类系统的系统结构和信号处理过程,它可以识别六种不同的雷达目标的类别,包括:步行者、骑自行车的人、车辆、人群、树木和交通标志等。
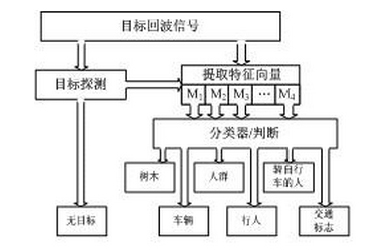
图5、汽车雷达对目标的分类处理过程
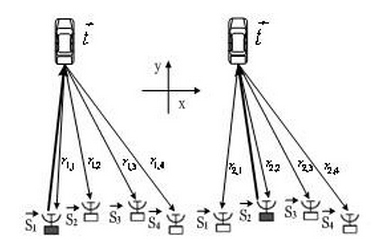
图6、汽车雷达网络对单目标实现测量
4、运动目标位置估算算法
FMCW雷达的基本原理是利用发射和回波信号之间的频率差来确定目标的距离和速度[5]。传统体制的FMCW采用等周期调频,在测量单个目标的情况下,简单可行,表现了良好的实时性和测距测速功能。但是当前方出现多个目标的时候,雷达就会出现判断上的困难。为了识别多个目标的距离和速度,可以采用变周期的FMCW波形作为发射信号。文献[6]给出了采用变周期的发射信号测量目标的距离和速度的算法。
对于本文所讨论的雷达网络系统而言,四个近距离雷达传感器即是发射机又是接收机。如图6所示,通过电扫开关的控制,其中的一个NDS担当发射机,反射信号被四个NDS同时接收。经过信号处理之后,因各个NDS之间位置的不同,可以得到四组关于被测目标的距离和相对速度值(r1,1v1,1)、(r1,2v1,2)、(r1,3v1,3)、(r1,4v1,4)。这种采用单基地发射多基地接收的雷达网络体制,尽管对传感器之间的时间同步控制要求很高,但是可以避免邻近传感器之间的相互干扰。
汽车雷达网络测量目标的距离和速度是通过对每个传感器测得的目标信息进行数据融合而得到的。在一个测量周期中,每个NDS轮流担当一次发射机。因此有16种距离和相对速度的组合,用向量表示为:
 (1)
(1)
在笛卡尔坐标系中用目标的状态向量来表述目标的位置矢量和相对速度矢量:
 (2)
(2)
每个传感器在笛卡尔坐标系中的位置用向量表示为:
 (3)
(3)
对于每个传感器而言,如果已知该传感器和目标在坐标系中的位置,那么距离可以由下面的非线性方程来计算:
 (4)
(4)
同理,得到关于目标的相对速度的方程:
 (5)
(5)
综合方程(1)、(2)、(4)、(5),可以得到目标的状态向量与四个传感器测得的目标的距离速度的多个非线性方程,用向量函数表示成:
 (6)
(6)
其导数矩阵,也就是雅可比矩阵为:
 (7)
(7)
对方程(7)采用高斯-牛顿迭代算法可以精确计算出目标状态向量的参数值,继而可以得到目标的位置和相对速度值。由于上述运算能够给出运动目标位置的笛卡尔坐标,因此很方便确定位置估算的精度和分辨率[7]。
5、毫米波汽车雷达网络的发展现状
目前,尽管国际上将毫米波汽车雷达网络的77GHz频段的研究很充分,但是,具体采用什么频段,每个国家还有差异,目前关于汽车用近距离雷达传感器的争论焦点之一是采用24GHz频段还是77GHz频段。争论的原因是77GHz雷达器件的成本和技术成熟度问题。因此,77GHz雷达传感器的成本和技术成熟度是汽车雷达网络是否能够在市场上取得普及应用的关键。
在77GHz雷达传感器的研发方面,关键技术是如何采用GaAs(镓砷)器件的工艺技术来设计和制造低成本的汽车近/远距离雷达传感器,进而降低整个汽车雷达网络的成本。国外GaAs器件制造业发展的速度很快,已经出现了一些极具性价比的汽车雷达传感器,一些报道甚至预言在2007年末2008年,汽车雷达网络的市场将启动,并有望成为普及型轿车的基本配置。
汽车雷达网络相对于其它系统,技术门槛要低得多。目前,中国汽车雷达的开
- 车用毫米波雷达传感器组网技术研究(11-16)
- 毫米波汽车防碰撞雷达技术原理及研发进展(12-14)
- 毫米波雷达系统的测试规范简析(06-28)
- 从构造和原理解析毫米波雷达和激光雷达(06-13)
- 96GHz毫米波雷达检测飞机跑道障碍物解决方案详解(09-01)