基于LabVIEWRT的数据实时传输系统
在仿真系统诸如分布式仿真系统、半实物仿真系统中, 数据通讯的正确性、快速性和可靠性对仿真的质量有着至关重要的决定影响。而通讯的实时性能与各部分的数据传输速度密切相关, 其中包括了硬件以及软件上各方面的因素。以往在硬件上采取的措施常常是研制高速的数字 /模拟量接口设备等, 但这种方法存在很多缺陷, 如缺乏通用性、传输距离受较大限制等等。而随着各种实时网络产品的开发, 其在仿真系统中的应用也愈加增多。这些产品的共同特点就是通讯速率快、传输距离长、通用性好, 并且可以连接多个节点组成一个实时网络,因而具有十分优越的应用性。本文根据实际仿真设备通讯的需求, 利用反射内存VM IP-CI- 5565及其集线器 VM I ACC - 5595组建了一个数据传输网络。并结合虚拟仪器编程语言LabVIEW( RT ), 编制了数据采集/传送软件。通过从硬件以及软件上多方面对提升系统实时性能的考虑, 使得系统具有良好的工作表现, 从而组建了一个具有较好适用性以及扩展性的通讯系统。
1 系统硬件组建
1 1 1 实时通讯网络与反射内存
实时通讯网络是用于需要较高实时性要求的应用领域的专用网络通讯技术, 一般采用基于高速网络的共享存储器技术实现。它除了具有严格的传输确定性和可预测性外, 还具有速度高、通信协议简单、宿主机负载轻、软硬件平台适应性强、可靠的传输纠错能力、支持中断信号的传输等特点。实时通讯网络可广泛用于各种领域, 例如实时的飞行仿真器、核电站仿真器、电讯、高速过程控制 (轧钢厂和制铝厂 )、高速测试和测量以及军事系统。VMIPCI-5565是 VMIC公司生产的基于 PCI总线的反射内存卡, 它使用光纤进行数据的传输, 从而不存在电磁辐射,也不受到来自无线电的电子 /电磁干扰, 具有很好的安全性和可靠性。另外, 5565采取了高性能的 H ub (网络集线器 ) 结构配置成实时网络, 可以实现多达 256个节点的计算机内存共享, 可以实现高速的实时数据通信[ 1]。因而, 其对于分布式仿真系统来说, 具有良好的应用价值。 VMIPCI- 5565组建的网络结构如图 1所示。
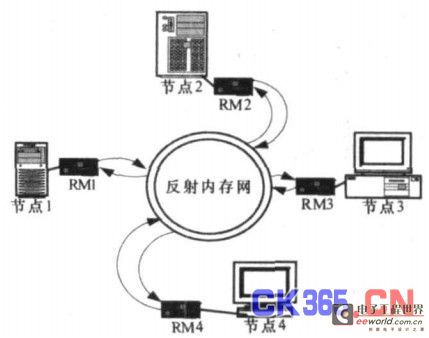
图 1反射内存网络组建结构
1 1 2 VM IACC- 5595的内部结构与系统网络结构反射内存卡 VM IPC I- 5565对应的网络集线器型号为 VMIACC-5595 , 它是一个8端口并且通过层叠可以实现 256节点网络的网络集线器。而由于 VM I ACC - 5595独 特的内部结构 [ 2], 使得在配置网络时会发现整个网络的实时性能有一定的差异。根据 VM IACC - 5595内部结构图[ 2]可知, 在利用其组建网络时, 纵使从外部看网络是星形结构, 但内部依然是双环形结构。VM I ACC - 5595简化的内部结构如图 2所示。
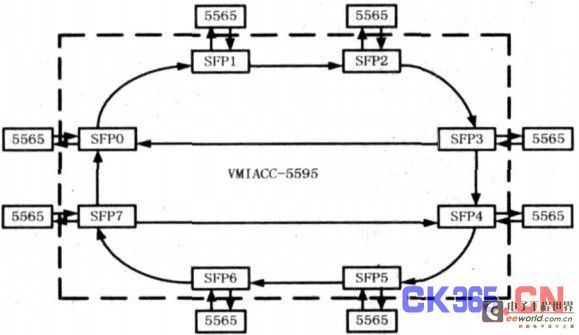
图 2 简化的 VM I ACC- 5595单机结构
可见由于 VM I ACC- 5595内部存在由 0、1、 2 、 3和 4、 5 、6、7节点组成的两个环形, 数据在任意两节点之间传送的时间并不像严格意义上的星形结构那样完全相同。如数据从 0节点传向 1节点和传向 3节点所费时间理论上应该是 1 /3关系,这样的差异在实际网络节点功能配置时是不得不考虑的。通过分析可以发现, 在设计网络时需要着重考虑节点 3和节点 0、节点 7和节点 4的内在关系, 这样可以即满足设计需求, 又能够减少数据在反射内存网络上的传输延迟。即根据节点对数据的要求来配置节点的位置, 若节点以发送数据为主则应配置在 3或 7节点, 而以接受处理为主要任务的节点则应配置在 4或 0节点。当存在数据向其它网络转接或集中处理节点时, 这点的考虑就会更加重要。后经实验证明, 不同配置的网络在 100个 32位精度数据传输时间上的差异在 10微秒级左右, 而随着数据量的增加时间差异会更加显著。在本系统中, 把主要产生数据的设备) ) ) /海鹰仿真机 0和 /银河仿真工作站0 (或数据采集计算机 ) 置于 3 、 7节点,而把数据处理设备如 SG I图形工作站、干扰与背景实时控制计算机等配置与其它节点。这样, 从节点的功能配置上力求到了最优化。
2 系统软件实现
2 1 1 LabVIEW 编程环境及其实时组件 (RT)
系统中数据采集 /传送程序利用 LabVIEW ( RT) 编制而成。 LabV I EW 是由美国NI公司推出了一种优秀的面向对象的图形化编程语言, 目前正被大量用于开发数据监测、数据测量采集系统、工业自动控制相同和数据分析系统等领域。LabV IEW 的实时组件 LabV I EW Rea l- T i m e ( RT) 是为了满足测控领域中日益增多的实时性需求而出现的。与 Lab -V I EW 不同, RT的工作模式为: 在宿主机上开发应用程序,然后下载到目标计算机上去运行。目标机可以是 N I公司专门研制的 RT目标智能板
LabVIEWRT数据实时传输系 相关文章:
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)
- 基于PCI 总线的高速数据采集系统(09-30)
- 泰克全新VM6000视频测试仪助力数字电视等产品测试 (10-06)