基于凌华PCI-9846高速数字化仪的复杂超声场自动检测与分析
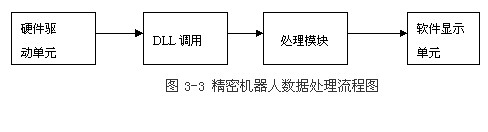
制模块。运动控制模块和采集模块的功能是与下位机DMC2410四轴运动卡和信号采集单元通讯,通过硬件组件提供的动态连接库DLL,向运动控制卡和数字示波器发送或提取需要的信息,驱动X、Y、Z轴步进电机运动,达到快速准确测量的目的。因此该模块的一端与硬件提供的动态链接库的DLL相连,能够从硬件系统中获得软件系统所需要的信息,如超声接收传感器的位置信息,即机器人X、Y、Z 轴的位置坐标,和采集到的超声波信息,并把信息进行基础的处理后传送给显示输出模块进行显示和输出,其原理框图如下图3-3所示。在进行数据结构和软件框架的设计上,要考虑人机界面友好,硬件控制和纠错功能要完善,还包括数据显示模块,数据可视化模块等。
4.系统功能实现
系统功能按照上述设计方案全部实现,按自动采集定位控制及信号采集分析分别分两步实现。根据实际测量的需要,根据功能不同分为四个部分,水听器定位,单轴扫描,三维扫描和声谱分析控制平台。
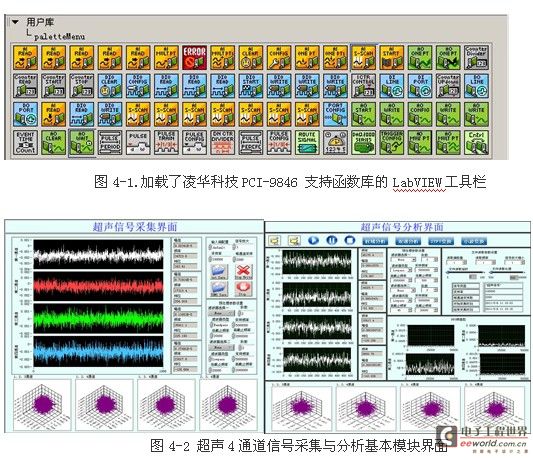
数据采集模块是该系统的核心,该模块的开发要首先下载凌华科技科技提供的PCI-9846H相关的LabVIEW支持函数库,并加载到LabVIEW工具库中(见图4-1),然后可以很方便的与原工具一样编制采集程序。实现了4通道数据的高速采集模块,并实现了该模块内置的在线观察预处理功能,如多参数滤波器、功率谱、频谱分析与幅值、频率等参数的测量(见图4-2)。同时该模块还实现了多种时域、高阶谱、短时傅里叶变化与小波等分析方法,可以对采集到的信号根据需要进行以上预处理,并进行同步三维显示,然后传到后面的三维声场自动分析模块进行建模分析。该模块可以作为单独的4通道超声信号采集与分析使用,可以将数据以文本、数据文件格式存储,也可以将存储的数据回放分析。将该模块作为一个LabVIEW超声信号采集类使用,将其植入相应的数据节点,用于后面的综合分析。
实现直线扫描运动控制,平面扫描运动控制,和三轴立体扫描空间运动控制,以一步一停的运动方式逐点采集数据。可以快速将传感器移动到需要采集的区域,然后从以上信号采集功能模块的数据节点读取数据,观察传感器所在位置的电信号变化,并定量判断该点的声压值。声场自动定位定位功能模块的参数控制面板见图4-3。
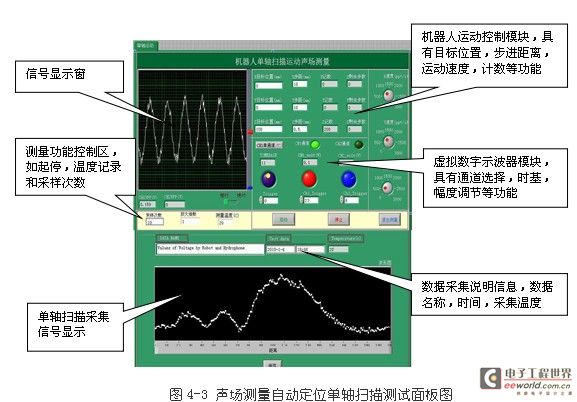
单轴扫描,三维扫描和声谱分析软件,是测量声场空间分布和时频特性的专用软件。单轴扫描可以显示在X,Y,Z方向上每个测量点的声压或声强沿直线方向的分布曲线图,通过与设计的各轴向声场分布理论值比较,可快速对超声换能器的性能作出评估。

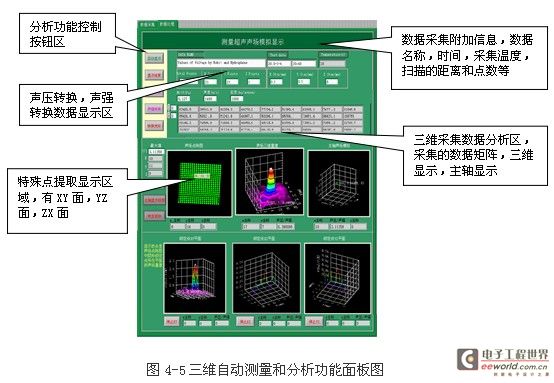
三维扫描软件能详细描绘整个三维空间和XY,XZ,YZ平面上的声场分布的情况,由于空间分辨率高,可以显示平面上的微小变化,通过不同声压或声强与颜色的对应关系,可以直观看出声场在空间的变化规律,为研究和工程人员提供可靠精确的分析途径,其应用界面见图4-5、6。
频谱分析采用离散傅里叶变换,对采集的声场电信号处理。利用频谱分析方法可研究高频超声信号的频域分布(见图4-6),对超声场全面了解,也是换能器性能测定的重要指标。

系统整合了精密机器人,硬件和各软件子系统的组成声场自动化测量系统。在实际测量中,利用其高空间分辨率和实时准确性,可对超声换能器的声场特性和频率特性准确测定,及理论模型的建立提供了有效数据。
5.系统功能的验证
为了验证系统的主要功能,选择一标准的凹球壳自聚焦超声换能器,连续波超声功率源驱动进行超声场声压分布参数的验证测试。换能器设计的几何参数分别为:换能器辐射面出口半径r=30mm,球壳曲率半径R=90mm,辐射中心频率f=1.3MHz,水介质的声速取1500m/s。测量声场的关键参数包括声压,声强和声焦域等,相应描述声场的基本形式主要有轴线声压曲线图,焦平面径向声压曲线图,焦平面声场曲面图,焦斑三维立体图。
经过测试换能器轴线声压曲线图显示了轴线上声压幅值随距离的变化的规律。水听器初始位置为声束中心轴线距离换能器40mm,经逐点扫描到140mm处结束,各点间距为0.5mm,测量值与理论值验证的结果如图5-1所示:
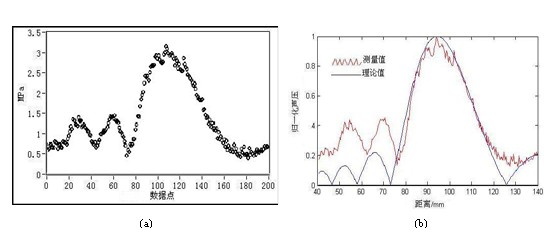
图5-1 轴向声压分布的理论值与测量值;(a)本文系统的实际测量值 (b)聚焦超声场理论模型仿真值和测量值比较
图5-1(a)是本文开发的系统的实际测量的数据值,该数据点是由机器人单轴扫描方式测试而得。图5-1(b)是在轴向上根据经典声场轴向声压分布模型建模计算的声压理论值与实测值比较的结果,波动的曲线是实际测量值,光滑实线是理论模型值。由模型可知在焦点以外的声压分布显示为低能量振荡,并逐渐衰减,而且在近场区和远场区的衰减幅度并不对称。测试
超声场自动化测量数字化 相关文章:
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)
- 基于PCI 总线的高速数据采集系统(09-30)
- 泰克全新VM6000视频测试仪助力数字电视等产品测试 (10-06)