基于凌华PCI-9846高速数字化仪的复杂超声场自动检测与分析
声场的计算建模及实际测量中存在的诸多困难。
3. 解决方案
本文设计和开发以凌华科技PCI-9846高速数字化仪为信息采集中心,组合前置放大器与检测传感器,用LabVIEW开发高效声场信号自动采集与分析系统,通过高效的数据采集模块,将三维声场的声压数据实时显示和保存。设计、制作步进电机驱动的四轴精密工业机器人系统,开发自动控制与自动测量系统,实现超声场任意部位的立体定位与数据采集之间的协调。开发声场测量数据的回放及多功能综合分析系统,可视化结果显示。实现超声换能器性能指标的快速准确地测量,并建立超声辐射场的建模仿真分析系统,以减轻测量人员的劳动强度,缩短计量检定的工作时间,提高超声换能器设计和使用的规范化,标准化和结果的可信度。
3.1 超声信号采集与分析
1)信号采集单元:超声信号采集以高速数据采集卡为中心,联合前置放大器与信号采集传感器,再经计算机平台的信号采集软件实现信号的采集。
在超声信号采集中,使用宽带灵敏度较好的水听器接收微伏级的电压信号,然后采用带通滤波选择采集的频率范围,再经前置放大器放大后进预处理,由高速数据采集卡A/D转换输入计算机中保存和显示。采集过程中,采样频率和带宽是重要指标。带宽一般是取频率谱的-3dB带宽,或者功率谱上的半功率点为信号带宽。超声信号采集的带宽直接影响整个设备的总分辨率,灵敏度和信噪比等。带宽范围大可以使接收到的信号频谱丰富,高频分量丢失小,波形失真小。在医用超声设备中,要尽量利用超声发射和接收换能器带宽,提高分辨力,同时又具有较高灵敏度和信噪比,使发射和采集电路的带宽要大于超声换能器的带宽[4]。采集的信号频谱确定在5M以下。信号采集方案原理图见图3-1。
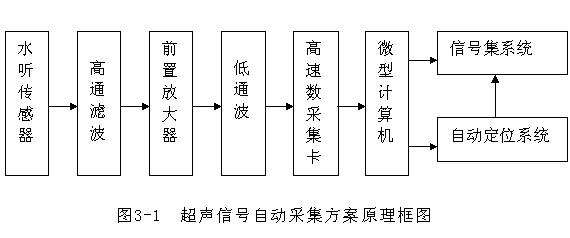
2)主要设备选型
高速数据采集卡采用凌华科技科技高速高分辨数字化仪PCI-9846H,它具有4通道16位高精度、40MS/s的采样率,具有低噪音及高动态范围性能,信号采集精度及密度高,可广泛应用与中频信号、雷达应用、光达应用、超声波信号以及无损伤检测方面。该数字化仪完全可以满足应用需求。
水听器选用海鹰ZS-500型针式水听器频率响应范围100K-5M。常用的超声信号采集传感器有PVDF薄膜型和针式水听器[5],由于薄膜型水听器在空间分辨率低,而且存在边缘效应,受温度限制等特点,本研究测量方法是高密度逐点自动扫描法,因此选择针式水听器作为信号采集传感器,直径小于1mm,具有灵敏度高等特点。前置放大器选用鹏翔科技PXPA Ⅳ声信号采集放大器,该放大器带宽范围为15k-2M、低噪音增益40dB,完全可以满足超声信号采集的前置放大要求。
3)超声信号分析
对超声瞬态的时域信号进行频谱分析时,保证信号处理中不会发生失真。为了减弱有限采样长度的超声波信号造成“泄露”现象,可以通过加时间窗函数的方法,有效防止频谱混叠,还可以抑制噪声,提高频率识别能力。调节超声发射换能器和水听器的距离,保持换能器轴线和回波声束共轴;调整表面回波信号的采样频率和采样点数,经过模拟数字数据离散处理,对采样的点数进行FFT转换;根据测得的波形幅度数据,经处理后,画出负载的频率响应曲线;计算超声换能器的频率特性参数,如中心频率。测量声场的关键参数包括声压,声强和声焦域等,相应描述声场的基本形式主要有轴线声压曲线图,焦平面径向声压曲线图,焦平面声场。在声场测量中会生成海量的数据,需要利用可视化技术。该技术将复杂的计算和仿真结果用具体形象的图形方式表示,加深了对数据的理解和规律分析,提高了处理效率,可以分析试验过程的变化,LabVIEW可视化技术为复杂超声换能器的分析和设计提供了有力的工具[6]。
3.2 超声场自动测量定位
整个测量过程的控制和测量点的定位是由一个成都海葳科技直角坐标机器人完成,其中将运动控制和数据采集模块有机地联系在一起,一方面控制机械臂带动水听器作自动扫描运动,另一方面控制信号采集模块采集信号,并对采集的数据进行后处理和可视化显示。整个自动控制平台是用LabVIEW系统开发,结合控制和测量的硬件,建立人机交互界面,完成对硬件的控制,数据分析和显示。自动测量控制平台的结构见图3-2。

根据超声辐射场测量和分析的需要,分为测量模块和分析模块。测量功能模块包含有上位机控制平台和数据实时处理平台。在综合分析平台中根据声场描述的需要,将采集到的电信号,转换成声压或声强值,并且将转换的值投影到对应的采集区域,采用可视化技术直观显示声场分布的变化规律。
进行自动测量最主要的是运动控制模块,数据采集控
超声场自动化测量数字化 相关文章:
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)
- 基于PCI 总线的高速数据采集系统(09-30)
- 泰克全新VM6000视频测试仪助力数字电视等产品测试 (10-06)