非接触式机器人测控系统的开发
时间:02-27
来源:互联网
点击:
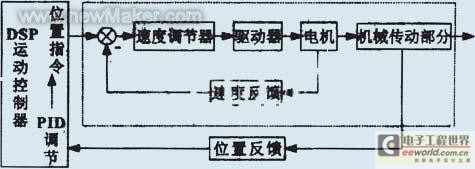
图3 单轴伺服系统
(6)测量系统X、Y、Z和W四个轴的读数,都是由控制计算机读取,并传给主计算机。摄像测头具有相对的独立性,为便于其开发以及与整个测量系统软件的连接,将运动控制与图像采集分开:运动控制通过控制计算机实现,图像采集则直接由主计算机实现。激光测头的运动控制和数据采集均由控制计算机完成。
3.2 控制系统软件
3.2.1 轨迹规划和测量控制软件体系
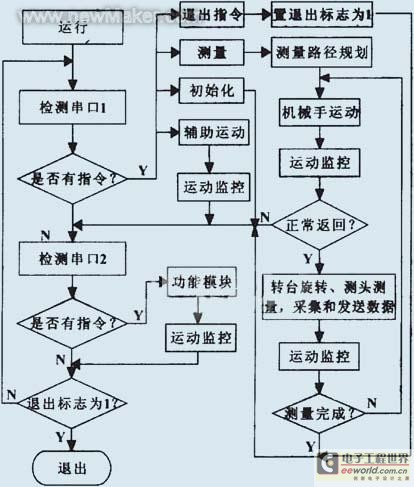
图4 运动控制软件流程
(1)通讯模块。负责管理控制计算机与主计算机、控制盒的通信。其中,主计算机使用串口1,控制盒使用串口2。当接收到指令时,产生中断,置指令标志。主程序通过检测该标志,判断是否有指令。
(2)主测量模块。主要完成测量路径规划及实现专用测量功能,包括内球面的测量控制、外球面的测量控制、圆柱的测量控制、平面的测量控制、表面缺陷等的测量控制,系统参数的标定测量控制,同时还负责控制机构点对点的运动等功能。
(3)初始化模块。主要对系统参数、标志位、通信端口和测量系统等进行初始化。
(4)辅助功能模块。测量机回零、复位、工件调偏、单轴运动、三轴联动和随动等。
(5)运动状态监控模块。主要是测量机软硬件限位、DSP运动控制器初始化、系统参数和电机运行状态等的监控。一旦检测到错误,则停止当前测量,向主计算机发送报警信息和出错原因,便于用户调整,保证了测量机运行的安全性。
(6)数据采集模块。主要负责对数据采集卡的初始化和测头、关节编码器数据的实时采集与处理。
3.2.2 系统监测软件
为了保障测量系统的安全性和可靠性,必须对运动进行监控。运动监控的流程如图5所示,主要包括主计算机、操纵盒停止指令监控、测量机运动状态监控。
测量机运动状态的监控的功能主要是测量机软硬件限位、DSP运动控制器初始化、系统参数和电机运行状态等的监控。一旦检测到错误,则停止当前测量,向主计算机发送报警信息和出错原因,便于用户调整。运动监控保证了测量机运行的安全性,是运动控制中非常重要的模块。
4 系统标定
4.1 系统标定
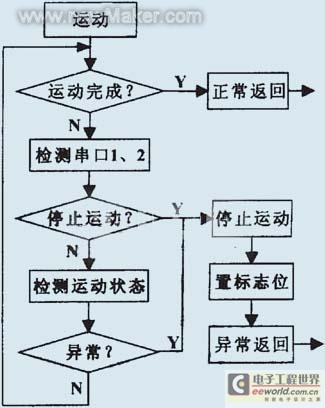
图5 运动监控流程
4.2 系统测试
该机器人测控系统成功地应用在球壳体工件几何尺寸及其表面形貌的无损测量中,表1是对某半球的测量结果。表中的数据表明该测控系统的具有较高的测量精度和可靠的稳定性。
表1 
本文介绍了一种新型的测控系统,该测控系统将机器人技术、非接触测量技术和主从控制相结合,实现了几何量测量和缺陷识别。系统本身具有一定的先进性和广泛的应用前景。经测试该测控系统的具有较高的测量精度和可靠的稳定性。为了进一步提高系统的稳定性和测量精度,更深入的研究和实验正在进行中。(end)
非接触式机器人测控系统测量精 相关文章:
- 频宽、取样速率及奈奎斯特定理(09-14)
- 为什么要进行信号调理?(09-30)
- IEEE802.16-2004 WiMAX物理层操作和测量(09-16)
- 为任意波形发生器增加价值(10-27)
- 基于PCI 总线的高速数据采集系统(09-30)
- 泰克全新VM6000视频测试仪助力数字电视等产品测试 (10-06)