开关电源的小信号模型和环路原理及设计
应较慢。
VMC的缺点可用下面将要介绍的CMC方法克服。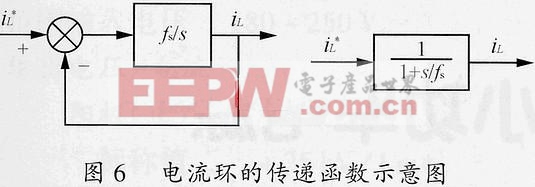
3 平均电流模式控制(AverageCMC)
平均电流模式控制含有电压外环和电流内环两个环路,如图4所示。电压环提供电感电流的给定,电流环采用误差放大器对送入的电感电流给定(Vcv)和反馈信号(iLRs)之差进行比较、放大,得到的误差放大器输出Vc再和三角波Vs进行比较,最后即得控制占空比的开关信号。图4中Rs为采样电阻。对于一个设计良好的电流误差放大器,Vc不会是一个直流量,当开关导通时,电感电流上升,会导致Vc下降;开关关断,电感电流下降时,会导致Vc上升。电流环的设计原则是,不能使Vc上升斜率超过三角波的上升斜率,两者斜率相等时就是最优。原因是:如果Vc上升斜率超过三角波的上升斜率,会导致Vc峰值超过Vs的峰值,在下个周波时Vc和Vs就可能不会相交,造成次谐波振荡。
采用斜坡匹配的方法进行最优设计后,PWM控制器的增益会随占空比D的变化而变,如图5所示。
当D很大时,较小的Vc会引起D较大的改变,而D较小时,即使Vc变化很大,D的改变也不大,即增益下降。所以有
d=DV'/Vs (17)
不妨设电压环带宽远低于电流环,则在分析电流环时Vcv为常数。当Vc的上升斜率等于三角波斜率时,在开关频率fs处,电流误差放大器的增益GCA为
GCA[d(iLRs)/dt]=GCA(Vo/L)Rs=Vsfs (18)
GCA=Vc'/(iL'Rs)=VsfsL/(UoRs) (19)
高频下,将式(14)分子中的“1”和分母中的低阶项忽略,并化简,得
iL'(s)=[d(s)Uin]/sL (20)
由式(17)及式(20)有
(iL'Rs)/Vc'=[Rsd(s)Uin/(sL)]/[d(s)Vs/D]=(RsUinD)/(sLVs) (21)
将式(19)与式(21)相乘,得整个电流环的开环传递函数为
(RsUinD/sLVs)?(VsfsL)/(UoRs)=fs/s (22)
图7
将s=2πfc代入上式,并令上式等于1时,可得环路的剪切频率fc=fs/(2π)。因此,可将电流环等效为延时时间常数为一个开关周期的纯惯性环节,如图6所示。显然,当电流误差放大器的增益GCA小于最优值时,电流响应的延时将会更长。
GCA中一般要在fs处或更高频处形成一个高频极点,以使fs以后的电流环开环增益以-40dB/dec的斜率下降,这样虽然使相角裕量稍变小,但可以消除电流反馈波形上的高频毛刺的影响,提高电流环的抗干扰能力。低频下一般要加一个零点,使电流环开环增益变大,减小稳态误差。
整个环路的结构如图7所示。其中KEA,KFB定义如前。可见相对VMC而言(参见图3),平均CMC消除了原来由滤波电感引起的极点(新增极点fs很大,对电压环影响很小),将环路校正成了一阶系统,电压环增益可以保持恒定,不随输入电压Vin而变,外环设计变得更加容易。
4 峰值电流模式控制(PeakCMC)
平均CMC由于要采样滤波电感的电流,有时显得不太方便,因此,实践中经常采用一种变通的电流模式控制方法,即峰值CMC,如图8所示。电压外环输出控制量(Vc)和由电感电流上升沿形成的斜坡波形(Vs)通过电压比较器进行比较后,直接得到开关管的关断信号(开通信号由时钟自动给出),因此,电压环的输出控制量是电感电流的峰值给定量,由电感电流峰值控制占空比。
峰值CMC控制的是电感电流的峰值,而不是电感电流(经滤波后即负载电流),而峰值电流和平均电流之间存在误差,因此,峰值CMC性能不如平均CMC。一般满载时电感电流在导通期间的电流增量设计为额定电流的10%左右,因此,最好情况下峰值电感电流和平均值之间的误差也有5%,负载越轻误差越大,特别是进入不连续电流(DCM)工作区后误差将超过100%,系统有时可能会出现振荡现象。在剪切频率fc以下,由图6可知平均CMC的电流环开环增益可升到很高(可以>1000),电流可完全得到控制,但峰值CMC的电流环开环增益只能保持在10以内不变(峰值电流和平均值之间的误差引起),因此,峰值CMC更适用于满载场合。
峰值CMC的缺点还包括对噪音敏感,需要进行斜坡补偿解决次谐波振荡等问题。但由于峰值CMC存在逐周波限流等特有的优点,且容易通过脉冲电流互感器等简单办法复现电感电流峰值,因此,它在Buck电路中仍然得到了广泛应用。
5 结语
采用平均状态方程的方法可以得到Buck电路的小信号频域模型,并可依此进行环路设计。电压模式控制、平均电流模式控制和峰值电流模式控制方法均可用来进行环路设计,各有其优缺点,适用的范围也不尽相同。
- 简述数字电位器基本原理与基本特性(12-09)
- 工程师福利:倾情奉献无线充电器设计原理及BOM清单(12-09)
- 集中器侧硬件原理图设计(12-09)
- 开关电源原理与设计主要器件之开关电源变压器(12-09)
- 变频器工作原理及控制方式介绍(12-08)
- 小型UPS电源的原理与维护(12-08)