雷达模拟器与雷达的接口电路设计
雷达在现代战争中发挥着举足轻重的作用,随着雷达技术的快速发展,对雷达装备试验、性能检测、故障诊断、保障和训练提出了更高的要求。在计算机电子技术快速发展和普及的当下,基于PC机的雷达模拟器以其所具有的优点成为解决这些问题的最佳选择。
雷达模拟器是不断通过与上位机(PC机)和雷达之间进行数据通信来生成模拟回波信号的。要使雷达模拟器生成的模拟回波信号能反映雷达接收真实目标的所有信息,就需要根据雷达信号构建模型和整体系统的设计思想,去采集雷达工作的状态参数。雷达模拟器通过接口电路来采集回波信号模拟所需要的雷达状态参数,经过调理后再传输至模拟器的控制主板。主要的雷达状态参数有雷达天线角度信号、雷达主脉冲、锥扫基准信号和载波频率大小。模拟器通过采集雷达天线角度信号作为雷达接收天线的当前波束指向,用于判断是否生成模拟回波信号和确定天线增益的大小;采集雷达主脉冲信号作为雷达信号模拟的时间基准,使模拟的信号与雷达保持同步;采集雷达锥扫基准信号为差信号的锥扫调制提供了相位基准;采集雷达载波频率用于调整回波模拟器射频卡的本振输出频率,确保生成的射频回波信号能够被雷达接收。下面主要介绍雷达模拟器与雷达接口电路的硬件设计。
1 接口电路的硬件设计方案
对雷达装备天线角度信号、主脉冲信号、锥扫基准信号和雷达载波频率等工作参数进行分析,可以知道这些信号的形式、性能和参数都不一样,因此雷达接口电路需要根据各信号的不同来设计相应的采集调理电路。
1.1 天线轴角电路设计
天线方位角和高低角转换电路的作用是将雷达天线的模拟角度信息转换为数字角度信息,并将数字化的角度信息传输至模拟器控制主板,主板根据雷达天线角度信息确定回波波束的作用范围和目标回波的天线增益大小。
雷达天线角度信息转换采用旋转变压器一数字转换器实现。硬件电路以单片机为核心,包括天线轴角调理电路、基准信号形成电路和串行通信电路等,电路框图如图1所示。
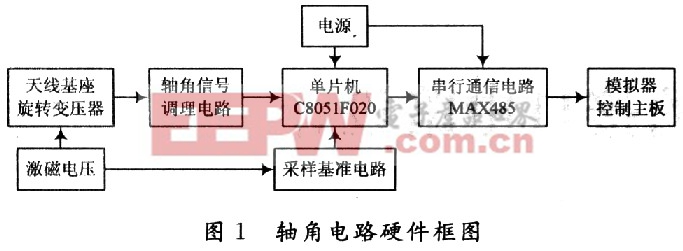
旋转变压器输出的信号一般为交流信号,以某型雷达为例,旋转变压器输出幅度为±10 V左右的交流电压信号。因为电路所用单片机(C8051F020)的ADC转换模拟电压的范围是0~VRFE(VRFE=2.45 V),所以在进行A/D转换之前,必须首先对该模拟信号进行降幅和去负值处理,这些任务由轴角信号调理电路来完成,如图2所示。输入轴角信号经过电阻分压和二极管负向门限电压的作用后,再经过电阻分压输出满足单片机需要的信号。
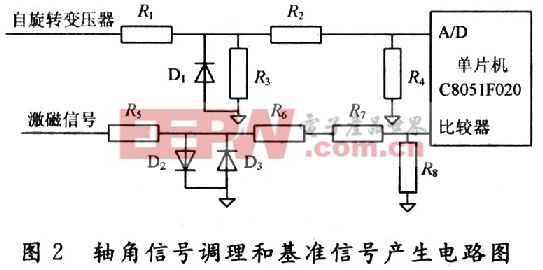
旋转变压器的激磁电压用来作为峰值采样的触发信号。由于激磁电压幅值大于单片机内部比较器的驱动电压,利用二极管的限幅作用,将激磁电压信号整形成近似方波信号,然后利用电阻对信号进行分压,确保采样触发信号在比较器能够承受的外部驱动电压范围(-0.25~+0.25 V)内,电路如图2所示。激磁信号在基准信号形成电路的作用下生成基准信号送单片机比较器的入口,比较器在基准信号上升沿产生中断,在中断中使能单片机的A/D口,将轴角信号调理电路调理过的天线方位角信号转化为数字信号。在整个单片机程序控制下电路完成了雷达天线角度信息的数字化,并经过串行通信电路传输到模拟器控制主板。
1.2 雷达主脉冲信号采集电路
雷达系统中的定时控制系统提供雷达正常工作所需要的全部定时信号和各种控制信号,其中雷达主脉冲信号由系统的重复频率控制电路形成,用来作为雷达总站及各分系统调试时的外同步信号。
模拟器控制主板的程序设计以雷达主脉冲作为回波数据计算与发送的时间基准,以此来保证与雷达工作时序的同步。具体实现方式为将控制板主控芯片的一个双向可编程标志位管脚配置为输入方式,且为中断产生模式,连接到主脉冲采集电路的输出端,并将其设置为上升沿中断方式。该管脚在接收到雷达主脉冲信号的上升沿后立即产生中断,当判断到有中断产生,程序进行雷达回波数据的计算与发送。
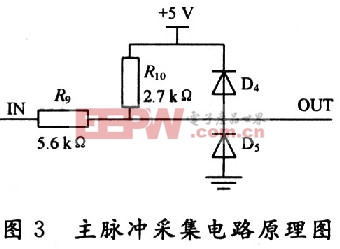
由于雷达主脉冲幅度为-10 V左右的负向脉冲信号,而控制主板的I/O端口承受电压为3.3 V左右,因此在将雷达主脉冲作为回波生成的时间基准接到主板设置引脚之前,须对其进行信号调理来实现降幅处理。针对雷达主脉冲信号设计的调理电路如图3所示。当输入电压为O V左右时,二极管D4,D5都截止,输出电压为电阻R9,R10对5 V电源的分压,约为3.3 V。当输入电压为-10 V时,二极管D5导通,输出电压为二极管D5的门限分压,约为-O.7 V。
1.3 雷达锥扫基准信号采集电路
磁耦合环在锥扫电机的带动下与基准电压发电机同步旋转,耦合圆波导内的磁场,形成高频调制差信号。在雷达自动跟踪目标时,若天线电轴偏离目标方向,就会产生误差信号。该误差信号为交流信号,其频率与馈线系统的低频调制频率相同。基准电压发电机输出的锥扫基准信号同时用作相敏检波器的电压基准,对误差信号进行检波。检出的角误差电压驱动电机带动天线跟踪目标运动。
- 实际环境应用中频率步进雷达系统的仿真与测试(12-12)
- 频率步进雷达系统的仿真与测试其实那么复杂(02-09)
- 雷达发射机大功率高压电源设计的思路和方法(12-16)
- 基于DDS理论的多模式多波形雷达信号源设计(03-21)
- 天气雷达回扫充电调制器的应用分析(03-15)
- 空投型雷达发射机阴极高压电源设计(02-17)