开关电源并联均流技术
摘要:讨论几种常用的开关电源并联均流技术,阐述其主要工作原理及特点。
关键词:均流主从控制电源内阻
1引言
在实际应用中,往往由于一台直流稳定电源的输出参数(如电压、电流、功率)不能满足要求,而满足这种参数要求的直流稳定电源,存在重新开发、设计、生产的过程,势必加大电源的成本、延长交货时间、影响工程进度。因此在实用中往往采用模块化的构造方法,采用一定规格系列的模块式电源,按照一定的串联或并联方式,分别达到输出电压、输出电流、输出功率扩展的目的。
但是电源输出参数的扩展,仅仅通过简单的串、并联方式还不能完全保证整个扩展后的电源系统稳定可靠的工作。不论电源模块是扩压还是扩流,均存在一个“均压”、“均流”的问题,而解决方法的不同,对整个电源扩展系统的稳定性、可靠性都有很大的影响。由于目前稳定电源输出扩流应用较多,本文仅讨论开关电源并联均流技术。均流的主要任务是:
(1)当负载变化时,每台电源的输出电压变化相同。
(2)使每台电源的输出电流按功率份额均摊。
2提高系统可靠性方法
(1)在电源并联扩流过程中,为了提高系统工作稳定性,可采用N+m冗余的方法。其中m表示冗余份数,m值越大,系统工作可靠性越高,但是系统成本也相应增加。
(2)采用均流技术保证系统正常工作。在电源并联扩流中,应用较为广泛的办法是自动均流技术。它通过取样、电子控制调节环路来保证整个系统的输出电流按每个单元的输出能力均摊,以达到既充分发挥每个单元的输出能力,又保证每个单元可靠工作的目的。
(3)均流技术应满足条件:
·所有电源模块单元应采用公共总线。
·整个系统应有良好的均流瞬态响应特性。
·整个并联输出扩流系统有一个公共控制电路。
(4)常用的几种并联均流技术:
·改变单元输出内阻法(斜率控制法)
·主/从控制法(master/slave)
·外部控制电路法
·平均电流型自动负载均流法
·最大电流自动均流法(自动主/从法、民主均流法)
·强迫均流法
3关于均流技术中常用的一些概念
3.1稳压源(CV)
电路框图和特性曲线分别如图1(a)、(b)所示,输出电压UO=RFUREF/R1

(a)
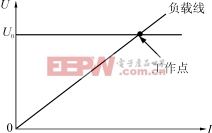
(b)
图1
3.2稳流源(CC)
电路框图和特性曲线分别如图2(a)、(b)所示,输出电流IO=RFUREF/(RSR1)

(a)
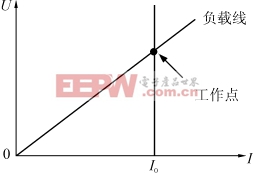
(b)
图2
3.3CV/CC(恒压/恒流交叠)
特性曲线如图3所示
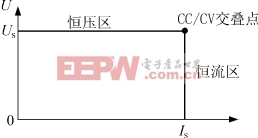
图3
4常用几种均流技术的工作原理
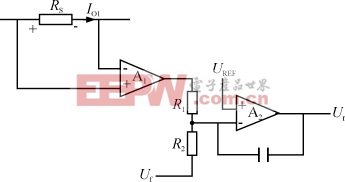
4.1改变单元输出内阻法(斜率控制法、电压下垂式、输出特性斜率控制式)
实现方式:
·UO固定,改变斜率
·斜率固定,改变输出电压
(1)工作原理和特性曲线
(a)
(b)
图4
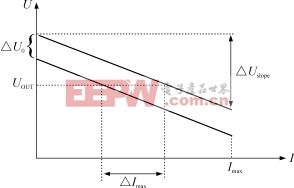
见图4(a)、(b),图中△Imax=△UOImax/△Uslope,内阻RO=△UO/△IO
当单元输出电流IO1增加时,IO1在电流检测电阻RS上的压降增加,致使A1输出电压增加,与单元电压反馈信号Uf叠加后送至A2反相输入端,经A2放大后输出Ur变负,利用这个Ur电压控制单元输出电流,从而实现均流。
由图4(b)可以看出:当典型值△UO=±0.1%,△Uslope=±2%,则△Imax=0.05Imax,即调整精度为5%。这种调节精度对大多数调节系统来说是能接受的。
(2)改变单元输出内阻法(斜率法)特点
·小电流时均流效果较差,这点可从公式
△Imax=0.05Imax看出。
·大电流时均流效果较好。
·对电压源来说,内阻RO(斜率)应越小越好,但是这种均流方法利用改变RO来实现均流,降低了电源输出的负载特性,即以牺牲电路的技术指标来实现均流。
·随着微处理器技术的发展,这种方法很容易实现程控,从而实现比较理想的均流控制特性。
4.2主/从控制法(Master/Slave)
(1)工作框图
见图5,在这种工作方式下用n个单元,其中一个单元(主控单元)工作在电压源(CV)方式,其余n-1个单元工作于电流源(CC)方式,利用来自输出电流的误差电压△U来实现均流控制。它实际上是由电压环(外环)和电流环(内环)构成电流控制型的双环控制,或说成是电压控制的电流源。
(2)主要特点
·一旦主控单元出现故障则整个系统崩溃。

图5
·由于电压环工作频带宽,易受噪声干扰。
·主/从单元间必须要有通讯联系,所以整个系统较复杂。
·可靠性取决于主模块,只能均流,不能构成冗余系统。
·适用于n个功率单元的系统。
4.3外部电路控制法
(1)工作原理
每一个单元加一个输出电流检测电路来检测它的电流,产生的反馈信号调节每个单元的电流,从而达到各单元间输出均流的目的。在这种情况下,每
- 无线充电物理技术分析(12-09)
- 飞轮储能技术在UPS系统中的应用(12-09)
- 基于DDS技术的实用信号源的设计(二)(12-09)
- 基于DDS技术的实用信号源的设计(一)(12-09)
- 电源技术基础:有效减少开关损耗的“软开关”技术(12-09)
- 关于电子信息技术中信号源的设计与制作(12-09)