电流型变换器工作原理和斜坡补偿
1引言
由于电流型控制较电压型控制方法有许多优点,所以得到了广泛使用,这已是不争的事实。但在恒频峰值电流检测控制方法中还存在如下问题:
——占空比大于50%时系统的开环不稳定性;
——由于峰值电流而非平均电感电流的原因而产生的系统开环不稳定性;
——次谐波振荡;
——抗干扰能力差,特别当电感中的纹波电流成分很小时,这种情况更为严重。
采用图1所示的在电流波形上加斜坡补偿的方法,可使电流型控制法在占空比大于50%的情况下,使系统稳定工作。实际上,只要电流型变换器采用了斜坡补偿,它的性能能得到很大的改善。
2峰值电流型控制存在的问题
下面主要讨论峰值电流型控制存在的问题及利用斜坡补偿克服所存在问题的方法,并给出斜坡补偿的实施方案。
2.1开环不稳定性
在不考虑外环电压环的情况下,当恒频电流型变换器的占空比大于50%时,就存在内环电流环工作不稳定的问题。然而有些变换器(如双管正激变换器)它本身工作的脉冲占空比就不能大于50%,因此不存在问题。而有些变换器的脉冲占空比不大于50%时,它的输入将会受到许多限制,如果在内环加一个斜坡补偿信号,则变换器可以在任何脉冲占空比情况下正常工作。下面介绍斜坡补偿工作原理。
图2表示了由误差电压Ve控制的电流型变换器的波形,通过一个拢动电流△I加至电感电流IL,当占空比0.5时,从图2(a)所示可以看出这个拢动ΔI将随时间的变化而减小;但当占空比>0.5时,这个拢动将随时间增加而增加,如图2(b)所示。这可用数学表达式表示:
ΔI1=-ΔI0(m2/m1)(1)
进一步可引入斜率为-m的斜坡信号,如图2(c)所示。这个斜坡电压既可加至电流波形上,也可以从误差电压中减去。有下列方程式成立:
ΔI1=-ΔI0(m2+m)/(m1+m)(2)
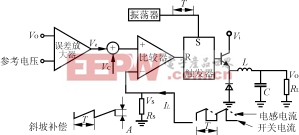
图1采用斜坡补偿的BUCK电流型控制
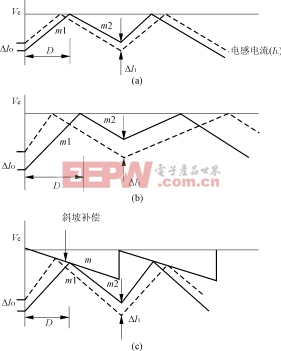
图2电流型变换器的开环不稳定性
(a)D0.5(b)D>0.5(c)D>0.5并加斜坡补偿
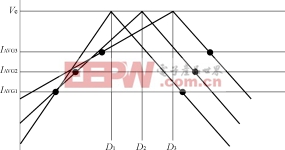
图3没有斜坡补偿的峰值电流检测与占空比关系图
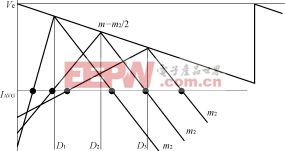
图4斜坡补偿m=-(1/2)m2时的平均电感电流将和占空
比D、输入电压无关
在100%占空比下求解这个方程有:
m>(-1/2)/m2(3)
为了保证电流环路稳定工作,应使斜坡补偿信号的斜率大于电流波形下降斜率m2的1/2。对图1所示的Buck型变换器,m2等于(VO/L)RS。所以补偿波形的幅度A应按下式计算:
A>TRS(VO/L)(4)
从而保证变换器的占空比大于50%时变换器能稳定工作。
2.2次谐波振荡
对电流型控制而言,内环电流环峰值增益是个很重要的问题,这个峰值增益在开环频率一半的地方,由于调制器的相移可能在电压反馈环开关频率一半的地方产生振荡,这种不稳定性叫做次谐波振荡。
3峰值电流检测与平均电流检测
在电流型变换器中由平均电感电流产生一个误差电压,这个平均电感电流可用一个电流源来代替,并可以降低系统的一个阶次。然而如图3所示,峰值电流检测方法常使电感的平均电流随占空比而变,致使输入一输出(正向特性)不理想。如选用图4所示m=-(1/2)m2的斜坡补偿率,可以把峰值电流检测转变为平均电流检测,而得到很好的电流型控制效果。但需注意m=-(1/2)m2,占空比接近1时的次谐波振荡现象。
4小纹波电流
从性能的角度总希望纹波电流要小,首先它可以使输出滤波电容的容量减小,并在轻载时的电流连续工作模式下输出纹波小。虽然对电流检测电路的小斜坡补偿量,在许多情况下可以得到小的纹波电流,但将由于随机和同步噪声信号的引入而致使脉冲宽度摆动。并且斜坡补偿加到电流波形上将会产生一个更稳定的开关点,为达到这个目的,相对于电感电流这个补偿量m应大于m2,并且这对次谐波稳定是有必要的。但任何斜坡补偿大于m=-(1/2)m2将使变换器的特性偏离理想电流型变换器而更像一个电压型变换器。
5UC1846的斜坡补偿
UC1846是一种采用斜坡补偿的电流型集成控制芯片,它具有恒频PWM电流型控制所需的控制电路和相关电路。图5(a)和图5(b)表示采用UC1846实施斜坡补偿的两种电路原理图。在第4脚的电流检测信号和斜坡补偿信号直接相加很容易实现,但这又在电流检测电路中引入了误差。另一种方法就是把这个斜坡补偿加至误差放大器的反相输入端,采用这种方法的前提条件是:
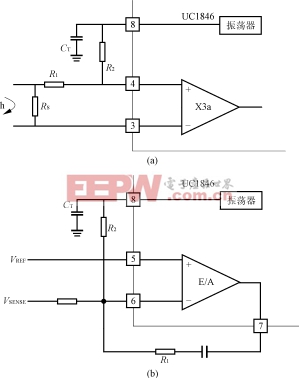
图5UC1846采用不同斜坡补偿方法的电路原理图
(a)斜坡补偿信号和电流检测信号相加
(b)斜坡补偿信号直接和误差信号相加
——开关频率固定(这种情况下R1/R2固定),并且误差放大器增益固定;
——计算所需斜坡补偿量时要把电压误差放大器,电流误差放大器的增益都考虑进去。在任何一种情况下
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)