变频调速恒压供水系统
1 单泵恒压供水系统
1.1 恒压供水的目的与系统构成
(1) 系统的构成
恒压供水系统的框图如图1所示。PS是压力变送器,它在测量管道内压力p的同时,还将测得的压力信号转换成电压信号或电流信号。该信号在控制系统中作为反馈信号,用XF表示。所以,反馈信号也就是实测的压力信号,即 xF∝p。
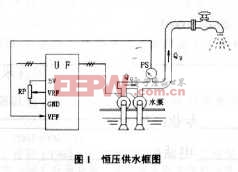
变频器预置为PID控制方式,XF接至变频器的反馈信号输入端VPF(电压信号)或IPF(电流信号)。
与用户要求的压力大小对应的信号称为目标信号,用XT表示。由电位器RP或键盘直接给出。
1.2 PID控制概述
(1) 系统的工作方式
变频器内部PID调节功能的框图如图2所示,XT和XF两者是相减的,其合成信号XD=(XT-XF);经过PID调节处理后成为频率给定信号XG,决定变频嚣的输出频率fx。
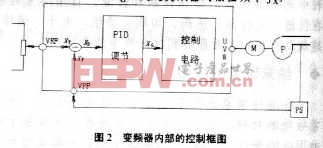
当用水流量减小,使QG>Qu时,则供水压力P↑→XF↑→ XD↓→fx↓→电动机转速nx↓→QG↓→QG=QU直至压力大小回复到目标值(XF≈XT),从而达到平衡;
反之,当用水流量增加,使QG →XD↑→fx↑→nx↑→QG↑→QG=QU→XF≈XT,又达到新的平衡。
因此,供水系统总是根据用户的用水情况不断地处于自动调整状态中。(2) PID调节的原理
①问题的提出 上述工作过程存在着一个矛盾:一方面,我们要求水管的实际压力(其大小与XF成正比)应无限接近于目标压力(其大小与XT成正比),即要求XD=(XT—XF)→ 0;另一方面,变频器的输出频率fx又是由XT和XF相减的结果来决定的。所以,如果把(xT-xF)直接作为给定信号xG,系统将无法工作。
② 比例增益环节(P)解决上述矛盾的方法是:进行放大后再作为频率给定信号:
XG=KP(XT-XF) (1)
式(1)中,KP为放大倍数,即比例增益。
上述关系如图3所示。由于XG是(XT-XF)成正比放大的结果,故称为比例放大环节。另一方面,XG又是使变频器输出某一频率fx所必须的信号。显然,KP越大,则(XT-XF)=XG/KP越小,XF越接近于XT。

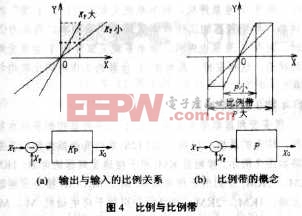
这里,XF只能是无限接近于XT,却不能等于XT,即XF和XT之间总会有一个差值,称为静差,用ε表示。该值应该越小越好。显然,比例增益KP越大, ε越小。
在专用PID调节器中,比例增益的大小常常是通过“比例带”来进行调节的。比例带就是按比例放大的区域,用P表示(等于是Kp的倒数),如图4所示。P越小,相当于KP越大。但在几乎所有变频器内置的PID调节功能中,都是直接预置KP的。
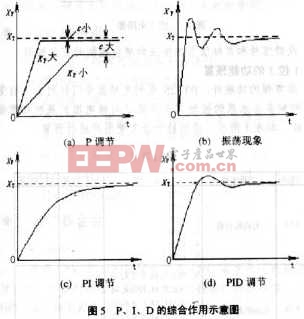
比例增益环节的引入,减小了系统稳定后的静差ε,如图5(a)所示。于是又出现了新的矛盾:为了减小静差ε,应尽量增大比例增益KP,但由于系统有惯性,KP过大容易引起被控量(压力)忽大忽小,形成振荡,如图5(b)所示。
③积分环节(1) 引入积分环节的目的是:
· 使给定信号XG的变化与乘积KP(XT—XF)对时间的积分成正比。即尽管KP(XT-XF)一下子增大(或减小)了许多,但XG只能在“积分时间”内逐渐地增大(或减小),从而减缓了XG的变化速度,防止了振荡。积分时间越长,xG的变化越慢;
· 只要偏差不消除(xT-XF≠0),积分就不停止,从而有效地消除静差,如图5(c)所示。
但积分时间太长,又会发生当被控量(压力)急剧变化时难以迅速恢复的情况。
④微分环节(D)其作用是:可根据偏差的变化趋势,提前给出较大的调节动作,从而缩短调节时间,克服了因积分时间过长而使恢复滞后的缺点,如图5(d)所示。
在供水系统中,当对过渡过程时间的要求并不严格时,通常用PI调节。常用的压力变送器与PID调节功能的预置#e#1.3 常用的压力变送器与PID调节功能的预置
(1) 常用的压力变送器
① 压力传感器是一种能够将压力信号转换成电压信号或电流信号(通常为4—20mA)的装置。当距离较远时,应选用电流信号,以消除因线路压降引起的误差。其接线图如图6(a)所示。
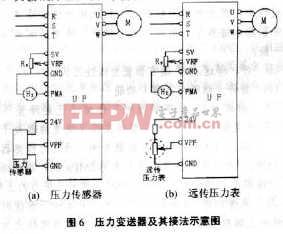
② 远传压力表其基本结构是在压力表的指针轴上附加一个能够带动电位器滑动触点的装置。因此,从电路器件的角度看,实际上是一个电阻值随压力而变的电位器。使用时,需另行设计电路将压力的大小转换成电压或电流信号。通常,变频器内可以提供转换电路所需的电压,如成都希望森兰变频器制造有限公司BTl2S变频器中,可提供24V直流电压,其接线方法如图6(b)所示。
(a) 压力传感器 (b) 远传压力表
远传压力表的价格较低廉,但由于电位器的滑动点总在一个地方磨擦,故寿命较短。
(2) PID功能的预置
①预置PID功能 预置的内容是:变频器的PID功能是否有效。当变频器的PID调节功能有效后,其升、降速过程将完全取
- 控制系统中常见的几种地线详解(10-13)
- VxWorks操作系统的CompactPCI测试仿真系统(12-12)
- 基于VxWorks操作系统的CompactPCI仿真系统(12-12)
- 电源系统管理中数字可编程 DC/DC 转换器的精确度探讨(12-12)
- 工程师详解测控系统仿真与测控设备软件化技术(12-12)
- 一种新型自动抄表系统数据集中器的设计(12-09)