基于PID单相逆变器复合控制方案设计
PID控制作为一种经典控制算法,具有结构简单、易于调试、动态响应特性快、鲁棒性强等特点。但是,对于中、低频周期信号,该算法仍无法实现无静差控制;对由非线性负载引起的输出波形畸变的调节能力也较差。
本文介绍了一种PID控制器与重复控制器采用串联拓扑结构的方案,将稳定的PID+控制对象闭环系统作为重复控制器的控制对象,在保证系统稳态误差和动态性能的同时,简化了重复控制器的设计。
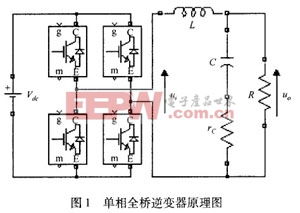
1 逆变器模型

式中,u0为输出电压;i 为电感电流; 为负载电阻;C为滤波器电容;£为电容等效串联电阻:
取采样频率和开关频率相等,把逆变桥看作一个零阶保持器,将式(2)离散化可得对象的脉冲传递函数为:

2 PID控制器设计
图2所示为PID控制系统的开环频率特性图(Bode图)。其中,G0为被控对象;G 为PID控制器;G=Gp×G0
按照传统PID设计理论,首先设开环系数为K=200,目的是提高系统低频增益,减小稳态误差。但是K值过大会降低系统稳定性,所以在低频段 处加一零点,与积分环节构成滞后校正。该滞后环节的作用主要有两条:一是在保证系统暂态性能基本不变的情况下,提高系统低频响应的增益,减小系统的稳态误差;二是利用其低通滤波特性衰减系统高频响应增益,提高系统的相角裕度,以改善系统的稳定性。

在中频段60 处加一零点,同时在高频段 处加一极点,由此构成超前校正。其作用主要有两条:一是利用相角超前特性增大系统的相角裕度,提高系统的截止频率,保证系统快速的动态响应;二是衰减系统高频响应增益,抑制高频噪声,提高系统鲁棒性。
图2中G为PID控制系统开环传递函数,由其频率特性曲线可以看到,系统低频开环增益非常大;截止频率附近频段相角裕度增大;高频段开环增益很小,抑制了高频干扰信号。通过滞后一超前相校正方法对PID控制器进行设计,达到了预期的目的。经过以上分析,PID传递函数为:

取采样频率和开关频率相等,采用零阶保持器将式(4)离散化可得对象的脉冲传递函数:

3 重复控制器设计
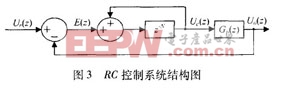
根据内模原理,在闭环系统中加入外部周期信号动态模型,则系统可以达到对外部周期信号渐近跟踪的目的,重复控制策略正是基于这一原理。图3为基本重复控制器系统结构图,其中重复控制器离散表达式为:

式中,Ⅳ为每基波周期对输出电压的采样次数。
由式(6)可知,当频率为∞=2~k/T(K=0,1,2,……,T为基波周期),由于z=1,所以若在闭环系统中嵌入重复控制器,将使开环增益趋向无穷大。在这种情况下,非谐波输入信号将被强烈衰减,达到精确跟踪输入信号的目的。但是,由于无法精确知道控制对象动态特性,所以开环增益趋向无穷大将恶化闭环系统的稳定性。为了保证系统稳定性,需对基本重复控制系统改进。
本方案提出的复合重复控制系统结构图如图4所示。
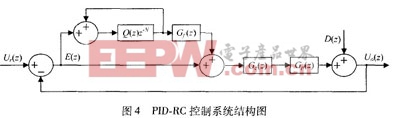
Q(z)、G,(。)为低通滤波补偿器,是重复控制器设计工作的重点。P( )的作用是将开环增益调节至很大的有限值,在不影响稳态精度的前提下保证系统稳定性;G,( )的作用是通过限制重复控制器的频带范围来提高系统的鲁棒性 。由图可得到系统的误差传递函数为:

式中,

根据小增益定理,上述系统稳定的条件是:
① 闭环系统G( )是稳定的。
②

由误差传递函数式(7)可知,如果:

则式(7)可重列为:

如果通过构造Q(z),在频率∞=2,rrk/T(k=0,1,2,……)处使:

则可以得到E(z):0。所以,当系统满足式(10),式(12)时,各阶谐波的稳态误差理论上将趋向零。但是,由于实际的系统为非理想系统,上述设计要求无法满足所有频段的谐波,通常是在一定频率范围内,根据稳定性条件式(8)、式(9)和控制器条件式(10),式(12)设计重复控制器,满足系统对稳态和动态的要求。
根据式(8)、式(10),补偿器G,( )可以直接设计为G( )的逆函数。但是,如果G(z)是非最小相位系统,虽然式(10)仍成立,外部表现稳定,由于有不稳定零极点对消情况,这将导致系统内部不稳定。这种情况下,必须采用其他类型的补偿器对G,( )进行设计。
本文中提出的方案,控制对象是PID控制器镇定的稳定闭环系统,其本身即为最小相位系统,所以可以直接使用逆函数设计补偿器,即:

式(12)理论上要求p(z)=1;然而式(9)表明,由于高频段G(z)趋向0,Q(z)在高频段应小于1,所以Q(z)应是一个具有零相移的低通滤波器,其表达式为:

实际应用中,采用一阶低通滤波器完全可以满足系统要求:

通过以上分析,现在重复控制器的两个滤波器可以根据式(13)、式(15)设计。
为了进一步理解重复控制器在系统中的作用,可以比
PID单相逆变器 相关文章:
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)