某些恒转矩负载变频调速的节能研究
1 概述
水泥、发电、电解铝、陶瓷等行业应用变频器已经非常普遍,生产机械如回转窑中的主传动、各种风机、传送带等原来不调速或用电磁调速和其他调速方式的,都相继被改造为变频交流调速。改造的目的是使生产过程中的工艺调速更为方便,从而提高产品的产量、质量,实现自动化、节能等。
但是,对粉磨工艺中的主要设备球磨机,采用变频调速传动,其本上还是空白。其原因是,球磨机工作时料筒的转速基本恒定,即使要变化,变化的范围也不大,如果考虑使其转速下降节能,就可能使球磨的时间增长,所以说采用变频调速是否有节能的效果很难说。实际上球磨生产过程比较简单,如给陶瓷厂的球磨机的料筒内加料16~18 t,在工作转速16~18 r/min 下运转8小时,料的细度就可达到工艺要求,出料后再加料,重复上述过程即可。一般来说,因厂家和球磨的原料不同,故球磨机的性能参数也有一定的差别,如发电厂磨煤使用的MTZ3570 球磨机,料筒有效内径3 500 mm,筒体长度7 000 mm,工作转速17.3 r/min,电机功率1 120 kW(6 kV)。球磨机的电气传动方式为,三相交流鼠笼异步电机—液力耦合器—齿轮减速器—皮带轮减速器,或三相交流鼠笼异步电机—齿轮减速器—皮带轮减速器,一般把球磨机的料筒作为减速器的皮带轮使用。球磨机重载起动时,若传动环节中无液力耦合器,即使使用自耦减压起动器或星—三角启动器,对电网也会造成较大的冲击,并且经常出现起动困难的状况。所以在传动环节中加入液力耦合器,会缓冲起动时的冲击,可在任何状态下顺利起动球磨机。
2 球磨机的临界转速和最佳工作转速
球磨机的转速直接影响到钢球和物料的运动状况及物料的磨制过程。在不同的转速下,筒体内的钢球和物料的运动状况如图1 所示。
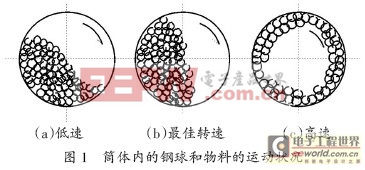
若转速比较低时,钢球和物料随筒体内壁上升,当钢球和物料的倾角等于或大于自然倾角时,钢球沿斜面滑下,如图1(a),不能形成足够的落差,钢球对物料的磨碎作用很小,这种情况效率很低。如果筒体的转速很高,由于离心力的作用,以致物料和钢球不再脱离筒壁,而随其一同旋转,如图1(c)。产生这种状态的最低转速称为临界转速nlj。临界转速下钢球没有撞击作用,物料只受到轻微的研磨,效率也很低。当筒体的转速处于上述两者之间时,钢球被带到一定的高度后沿抛物线落下,如图1(b)。此时钢球对筒底的物料产生强烈的撞击作用,效率最高。效率最高时的工作转速称为最佳工作转速nzj。
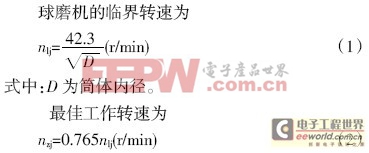
nzj=0.765nlj(r/min) (圆)实际运行表明,最佳工作转速与钢球的直径及其装载量、护甲形状、钢球与护甲之间的摩擦系数等因素有关。一般最佳工作转速通常为nzj=(0.74耀0.8)nlj,可见转速还是有一定的可调范围,只不过可调范围不大。实际上,如上所述的陶瓷厂的球磨机,其料筒转速的变动范围在16~18 r/min之间,电机的转速是1 440 r/min,通过齿轮减速器和皮带轮减速后的料筒的转速在上述允许转速的变动范围内。如果减速机构的配置使料筒的运转速度正好为18 r/min,则有11%的调速范围;如果减速机构的配置使料筒的运转速度为16 r/min,则调速范围为零。实际上,机械减速器不可能做到很精确,所以料筒的运转速度就在16~18 r/min 之间的某一个速度值,因此,可调速范围0~11%。
球磨机为恒转矩负载机械,电机输出的轴功率PZ为
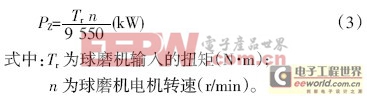
由式(3)可见,球磨机消耗的电功率与电机的转速的一次方成正比,因此,用变频器在基频以下调节电机的转速可节能,但节能的幅度与调速的范围有关。
3 电动机的效率
某球磨机的电机为90 kW,正常运行时电机电流为80~110 A,负载率62%。由于负载率不高,故电机的效率也要降低。正常运行时,电机的功率不会超过55 kW,考虑到球磨机是重载起动,为保证顺利起动适当加大电机的容量是必要的。从表面上看,似乎有较大的节能空间。实际上,为不影响球磨机的生产效率,如采用变频调速时,变频器的输出频率仍然是50 Hz,即使需要调速,也不可能作大范围的调节,频率只能小范围的降低,故节约能量有限。现在的变频器一般都有“节能运行”功能,如森兰SB40S 系列变频器的参数F82为自动节能运行。变频器的“节能运行”,实质上是调压节电功能。变频器运行频率不变的条件下自动调节其输出电压,使电动机的效率提高。要知道究竟能提高多少效率,就有必要对电动机的效率进行分析。
3.1 电机的效率
中小型异步电动机的效率和功率因数都是负载率的函数,效率表示电机运行时有功功率的利用率,是输出功率与输入功率之比,即
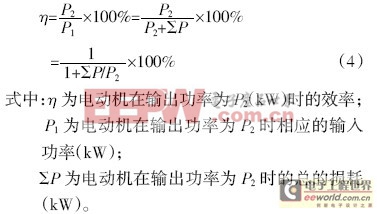
由式(4)可见,对于一定的负载,当电机的输出功率一定时,电机的
- 基于DSP的变频调速控制系统的软件设计(12-14)
- 无逆变桥的低成本IC自动控制变频调速系统方案(12-12)
- 基于DSP串行通信在变频调速系统中的应用(12-13)
- 一款基于8098单片机的SPWM变频调速系统设计(11-30)
- 变频调速系统设计中的问题探讨(11-30)
- 自动旁路型智能高压变频调速系统在CFB锅炉风机高压变频改造应用(02-22)