PFC应用案例:PFC直接电流控制策略综述
PFC的控制策略按照输入电感电流是否连续,分为电流断续模式(DCM)和电流连续模式(CCM),以及介于两者之间的临界DCM(BCM)。有的电路还根据负载功率的大小,使得变换器在DCM和CCM之间转换,称为混连模式(Mixed Conduclion Mode一一MCM)。而CCM根据是否直接选取瞬态电感电流作为反馈量,又可分为直接电流控制和间接电流控制。直接电流控制检测整流器的输入电流作为反馈和被控量,具有系统动态响应快、限流容易、电流控制精度高等优点。本文总结了PFC技术的直接电流控制策略,对比分析了几种典型控制策略的优缺点,指出了这些控制技术的发展趋势。
直接电流控制有峰值电流控制、滞环电流控制、平均电流控制,预测电流控制、无差拍控制、单周控制、状态反馈控制、滑模变结构控制、模糊控制等方式。
1 各种直接电流控制策略
1.1 峰值电流控制
峰值电流控制的输入电流波形如图1所示,开关管在恒定的时钟周期导通,当输入电流上升到基准电流时,开关管关断。采样电流来自开关电流或电感电流。峰值电流控制的优点是实现容易,但其缺点较多:

1)电流峰值和平均值之间存在误差,无法满足THD很小的要求;
2)电流峰值对噪声敏感;
3)占空比>0.5时系统产生次谐波振荡;
4)需要在比较器输入端加斜坡补偿器。
故在PFC中,这种控制方法趋于被淘汰。
1.2 滞环电流控制
滞环电流控制的输入电流波形如图2所示,开关导通时电感电流上升,上升到上限阈值时,滞环比较器输出低电平,开关管关断,电感电流下降;下降到下限阈值时,滞环比较器输出高电平,开关管导通,电感电流上升,如此周而复始地工作,其中取样电流来自电感电流。

滞环电流控制是一种简单的Bang-hang控制,它将电流控制与PWM调制合为一体。结构简单,实现容易,且具有很强的鲁棒性和快速动态响应能力。其缺点是开关频率不固定,滤波器设计困难。
目前,关于滞环电流控制改进方案的研究还很活跃,目的在于实现恒频控制。将其他控制方法与滞环电流控制相结合是SPWM电流变换器电流控制策略的发展方向之一。
1.3 平均电流控制
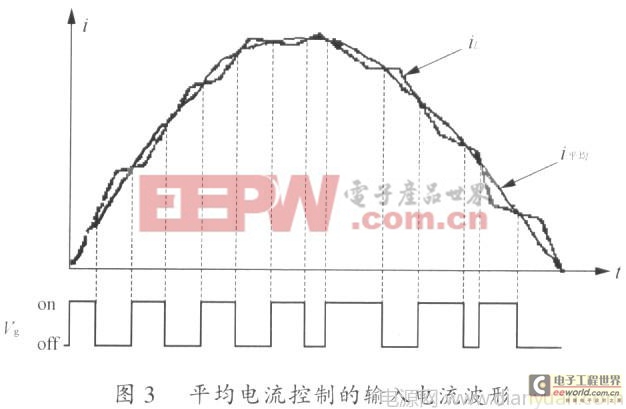
平均电流控制的输入电流波形如图3所示。平均电流控制将电感电流信号与锯齿波信号相加。当两信号之和超过基准电流时,开关管关断,当其和小于基准电流时,开关管导通。取样电流来自实际输入电流而不是开关电流。由于电流环有较高的增益带宽、跟踪误差小、瞬态特性较好。THD(5%)和EMI小、对噪声不敏感、开关频率固定、适用于大功率应用场合,是目前PFC中应用最多的一种控制方式。其缺点是参考电流与实际电流的误差随着占空比的变化而变化,能够引起低次电流谐波。
1.4 预测电流控制
预测电流控制就是通过对输入、输出电压和输入电流的采样,根据实际电流和参考电流的误差,选择优化的电压矢量(脉冲宽度)作用于下一个周期,使实际电流在一个周期内跟踪卜参考电流,实现稳态无误差。其优点是开关频率固定,动态性能良好,电流谐波小,器件开关应力小,数字化实现简单。其缺点是要求较高的采样频率和开关频率,在低的采样频率下,会产生周期性的电流误差。
1.5 单周控制(积分复位控制)
单周控制是一种非线性控制,同时具有调制和控制的双重性。其原理如图4所示。单周控制通过复位开关、积分器、触发电路、比较器达到跟踪指令信号的目的。
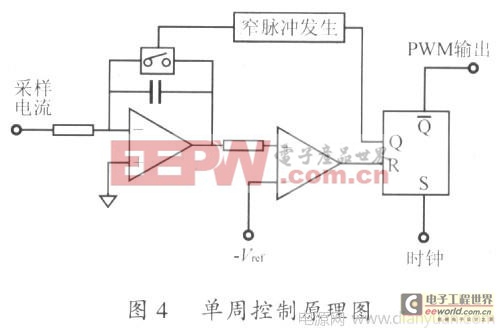
这种方法的基本思想是通过控制开关占空比,在每个周期内强迫开关变量的平均值与控制参考量相等或成一定比例,从而在一个周期内自动消除稳态、瞬态误差,前一周期的误差不会带到下一周期。单周控制能优化系统响应、减小畸变和抑制电源干扰,具有反应快、开关频率恒定、鲁棒性强、易于实现、抗干扰、控制电路简单等优点,是一种很有前途的控制方法。其缺点是需要快速复位的积分电路,单周控制在DC/DC变换器中已经得到充分的研究.作为一种调制方式,该技术在PFC方面也有了广泛的应用。
1.6 无差拍控制
无差拍控制的基本思想是将输出参数等间隔地划分为若干个取样周期。根据电路在每一取样周期的起始值,预测在关于取样周期对称的方波脉冲作用下某电路变量在取样周期末尾时的值。适当控制方波脉冲的极性与宽度,就能使输出波形与要求的参数波形重合。不断调整每一取样周期内方波脉冲的极性与宽度,就能获得波形失真小的输出。
该方法是一种全数字化的控制技术。它利用前一时刻的指令电流值和实际补偿电流值,根据空间矢量理论计算出整流器下一时刻应满足的开关模式。其优点在于数学推导严密、跟踪无过冲、动态性能好,易于计算机执行等。缺点是计算量大,且对系统参数依赖性较大。但是,随着数字信号处理单片机(DSP)应用的不断普及,这是一种很有前途的控制方法
PFC直接电流控制 相关文章:
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)