开关电源控制环设计原理
1. 绪论
在开关模式的功率转换器中,功率开关的导通时间是根据输入和输出电压来调节的。因而,功率转换器是一种反映输入与输出的变化而使其导通时间被调制的独立控制系统。由于理论近似,控制环的设计往往陷入复杂的方程式中,使开关电源的控制设计面临挑战并且常常走入误区。下面几页将展示控制环的简单化近似分析,首先大体了解开关电源系统中影响性能的各种参数。给出一个实际的开关电源作为演示以表明哪些器件与设计控制环的特性有关。测试结果和测量方法也包含在其中。

2. 基本控制环概念
2.1 传输函数和博得图
系统的传输函数定义为输出除以输入。它由增益和相位因素组成并可以在博得图上分别用图形表示。整个系统的闭环增益是环路里各个部分增益的乘积。在博得图中,增益用对数图表示。因为两个数的乘积的对数等于他们各自对数的和,他们的增益可以画成图相加。系统的相位是整个环路相移之和。
2.2 极点
数学上,在传输方程式中,当分母为零时会产生一个极点。在图形上,当增益以20dB每十倍频的斜率开始递减时,在博得图上会产生一个极点。图1举例说明一个低通滤波器通常在系统中产生一个极点。其传输函数和博得图也一并给出。

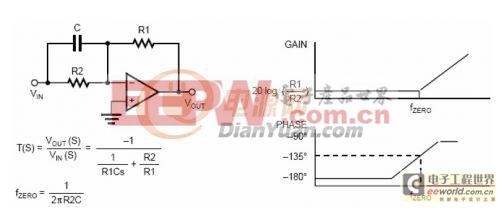
2.3 零点
零点是频域范围内的传输函数当分子等于零时产生的。在博得图中,零点发生在增益以20dB每十倍频的斜率开始递增的点,并伴随有90度的相位超前。图2描述一个由高通滤波器电路引起的零点。
存在第二种零点,即右半平面零点,它引起相位滞后而非超前。伴随着增益递增,右半平面零点引起90度的相位滞后。右半平面零点经常出现于BOOST和BUCK-BOOST转换器中,所以,在设计反馈补偿电路的时候要非常警惕,以使系统的穿越频率大大低于右半平面零点的频率。右半平面零点的博得图见图3。

3.0 开关电源的理想增益相位图
设计任何控制系统首先必须清楚地定义出目标。通常,这个目标是建立一个简单的博得图以达到最好的系统动态响应,最紧密的线性和负载调节率和最好的稳定性。理想的闭环博得图应该包含三个特性:足够的相位裕量,宽的带宽,和高增益。高的相位裕量能阻尼振荡并缩短瞬态调节时间。宽的带宽允许电源系统快速响应线性和负载的突变。高的增益保证良好的线性和负载调节率。
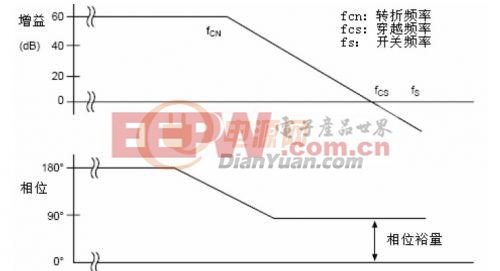
3.1 相位裕量
参看图4,相位裕量是在穿越频率处相位高于0度的数量。这不同于大多数控制系统教科书里提出的从-180度开始测量相位裕量。其中包括DC负反馈所提供的180度初始相移。在实际测量中,这180度相移在DC处被补偿并允许相位裕量从0度开始测量。
根据奈奎斯特稳定性判据,当系统的相位裕量大于0度时,此系统是稳定的。然而,有一个边界稳定区域存在,此处(指边界稳定区,译注),系统由于瞬态响应引起振荡到经过一个长的调节时间最终稳定下来。如果相位裕量小于45度,则系统在边界稳定。当相位裕量超过45度时,能提供最好的动态响应,短的调节时间和最少过冲。
3.2 增益带宽
增益带宽是指单位增益时的频率,见图4,增益带宽就是穿越频率Fcs。最大穿越频率的主要限制因素是电源的开关频率。根据采样定理,如果采样频率小于2倍信号频率(更严谨一点的说法是应该小于2倍最大信号频率,译注),则被采样的信息就不能被完全读取。
在开关电源中,开关频率可以从输出纹波中看得出来,它是错误的信息,并且必须不被控制环路所传递。
因此,系统的穿越频率必须小于开关频率的一半,否则,开关噪声和纹波会扭曲输出电压中想要得到的信息,并导致系统不稳定。
3.3 增益
高的系统增益对于保证好的线性和负载调节率提供重要贡献。它能够使PWM比较器在响应输入输出电压的变化时精确地改变电源开关的占空比,通常,需要在决定高增益和低相位裕量之间做出权衡。
4. 实际设计分析举例
用经典环路控制分析方法,开关调整器的控制环分为四个主要部分:输出滤波器,PWM电路,误差放大器补偿和反馈。图5用方块图举例说明这四部分,图6举例说明一个开关电源电路图。
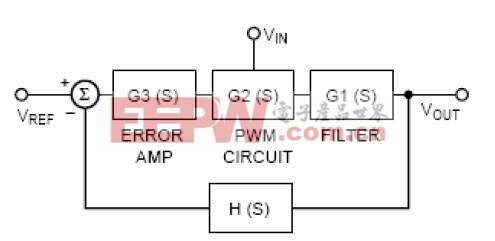
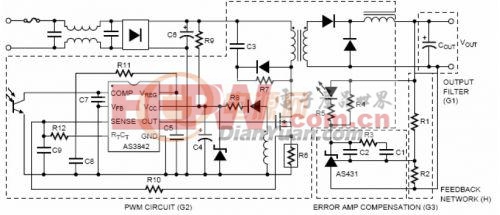
首先,输出电压被反馈网络降压,然后把这个反馈电压送入误差放大器,使之与基准电压相比较而产生一个误差电压信号。脉宽调制部分拾取这个误差电压并且把它与功率变压器的电流相比较并转化为合适的占空比去控制输出部分功率脉冲调制的数量。输出滤波器部分使来自于功率变压器的斩波电压或电流平滑,使反馈控制环完善。下面确定每一部分的增益和相位,并把他们联合起来形成系统的传输函数和系统的增益相位点。
4.1 反馈网络H(s)
反馈网络把输出电压降到误差放大器参考电压的水平,其传输式按简单的电阻分压式得到:

4.2 输出滤波部分G
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)
- 高效地驱动LED(04-23)
- 开关电源要降低纹波主要要在三个方面下功夫(06-24)
- 超宽输入范围工业控制电源的设计(10-15)