双环控制策略的有源功率因数校正电源研究
1、引言
开关电源已成为电网最主要的谐波源之一。为了减小开关稳压电源对供电电网的污染和对外部电子设备的干扰,电源中普遍采用了功率因数校正(power factor correction, PFC)技术。功率因数校正技术的作用是在电网与负载之间插入校正环节,使输入电流波形逼近输入电压波形,以提高功率因数并限制开关电源的谐波电流对电网的污染。
由于单一的电压环控制系统的特点是结构简单,设计方便,但是当系统受到某种扰动时,例如,输入电压波动、元件参数变化和负载突变,系统中的各电气变量均会发生变化。而这些变化只有等到输出电压发生变化以后,电压控制环才起调节作用。因此,在瞬态过程中,单环系统的输出电压可能会产生较大幅度的波动,甚至造成系统出现不稳定现象[1][3]。
一般说来,开关变换器的小信号交流等效电路为二阶电路。根据最优控制理论,实现全状态反馈的系统是最优控制系统,可以实现动态响应的误差平方积分指标最小[2]。因此,在开关调节系统中取输出电压和电感电流两种反馈信号实现双环控制是符合最优控制理论的[4]。
基于双环调节系统可以提高系统的稳态和动态性能的优点,本文中,基于功率因数校正和脉宽调制稳压变换一体的开关电源控制芯片UCC38500,设计了一台输出电压48V,输出功率300W的功率因数校正电源样机。文中讨论了该样机的设计与控制方法,给出了电流内环和电压外环的设计过程。试验结果表明,所设计的样机控制电路简单,运行可靠,性能基本达到设计指标。
2、工作原理
图1给出所设计的样机的电路原理框图。前级采用Boost拓扑结构的PFC电路,在实现功率因数校正的同时把输入电压提升到直流385V;后级为应用双管正激拓扑结构的PWM电路,把385V直流母线电压降低到48V,实现输入与输出的电气隔离。
前级功率因数校正环节基于平均电流控制原理,采用电压控制环和电流控制环的双闭环控制方式,其中电压控制环使Boost电路输出的直流母线电压更稳定;电流控制环使输入电流接近正弦波。控制过程如下:经取样的直流母线电压与基准电压信号相比较,通过电压误差放大器输出电压误差放大信号。该信号与取样后的电源正弦半波信号相乘,作为电流误差放大器的基准电流信号。被检测的电感电流,在电压误差放大器中与基准电流相比较,经电流误差放大器后与给定的锯齿波比较,提供某一数值的占空比信号,经驱动器输出驱动信号,驱动开关管,这就形成了电流环。电流误差能被迅速而精确地校正,从而保证电流控制精度。
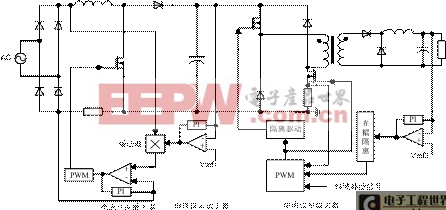
图1 电路原理框图
后级DC/DC功率级变换也采用双闭环控制方式。电流内环采用峰值电流控制模式,对开关电流的峰值进行逐个脉冲采样控制。电压误差放大器输出信号,通过光耦隔离,产生电流参考信号。被采样电阻检测的开关电流与电流参考信号比较,经驱动器输出两路隔离的驱动信号。
3、电路设计
电路设计基于UCC38500控制芯片,其PFC与PWM的开关频率比为1:1。设计的主要电路参数为:输入电压 ,直流母线电压
,直流母线电压 ,电路开关频率
,电路开关频率 ,功率因数PF=1,输出功率P0=300W,输出电压V0=48V,前级PFC中电感电流采样电阻的大小
,功率因数PF=1,输出功率P0=300W,输出电压V0=48V,前级PFC中电感电流采样电阻的大小 ,滤波电容大小为
,滤波电容大小为
(1)升压电感的设计。
由于磁粉芯材料具有磁导率小,线性度高、饱和磁密大,工作频率范围宽。所以广泛的被用于功率因
数校正电感的设计。所以在设计中电感的型号选用性价比较高的26#铁粉芯。

2)电流控制环补偿网络设计。
在平均电流模式中,如果电流补偿网络的增益太大,就会造成补偿网络的输出电压的最大值超过锯齿波的峰值或者说输出电压的波形不会与锯齿波相交,则放大器就工作在饱和的工作状态,导致系统的不稳定。所以在设计该系统时,PWM比较器中的两个输入信号的斜率满足文献[4]中提到的斜坡匹配标准,即:电感电流下降的斜率不能超过锯齿波上升的斜率。
在Boost-PFC系统中,假定Vm为锯齿波的峰峰值,本设计中Vm=4.32V,则电感电流下降的斜率K1,和锯齿波上升的斜率K2可以分别表示为:

在最坏的情况下,即 ,故有,当K1=K2时即电流补偿网络的最大增益为:
,故有,当K1=K2时即电流补偿网络的最大增益为:
所以中频段的增益为:

取电流误差放大器的穿越频率为, 由于补偿网络在穿越频率处具有平坦的特性,提供了大于450的相位裕量。所以将零点设置在
由于补偿网络在穿越频率处具有平坦的特性,提供了大于450的相位裕量。所以将零点设置在 处,即
处,即 ,则有
,则有
由于Boost系统在穿越频率处含有右半平面的零点[1],所以高频极点设置在开关频率 处。所以前级PFC的开环传递函数[1]为:
处。所以前级PFC的开环传递函数[1]为:
运用MATLAB仿真,仿真结果见图2(b)。可见,穿越频率为8.63kHz,相位裕量为57°。所以补偿网络的设计是合理的。

(a) 电流误差放大器结构图 (b) 幅频特性和相频特性
图2 电流误差放大器
为了使补偿网络的
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)