基于68HC908SR12的智能数字化开关电源设计
引言
与线性电源相比,开关电源具有诸多优点:由于主功率晶体管工作在开关状态,其损耗小,整机效率大大提高;采用铁氧体高频变压器,使电源的体积和重量大为减少,成本更低等。一些专用电源芯片如TL494、UC3842的出现,也使开关电源的设计更为简单,同时性能可靠。但只使用专用芯片制作的开关电源输出通常为单一状态,若要改变输出状态要对硬件电路进行修改。笔者设计实现了一种单片机控制的数字化开关电源,有效的改善了上述问题。
1 数字化开关电源的设计原理
笔者设计的数字化开关电源额定功率12OW。系统以开关电源作为基本电路,采用高性能单片机作为控制系统,在控制算法的支持下,通过对输出电压和电流进行实时采样,并与软件给定值相比较,控制和调整开关电源的工作状态,得到期望值。主要包括输入的整流滤波校正、功率变换、辅助电源部分、驱动电路、单片机控制系统5部分。功率变换部分采用单端反激变换电路,辅助电源为驱动电路提供电能,驱动电路将来自单片机的PWM 信号放大后驱动主功率晶体管,单片机系统是整个电路的控制核心,通过采样值的变化实时控制输出PWM 的占空比。整个设计力求做到了性能最优,成本最低。其结构如图1所示。

1.1 主电路分析
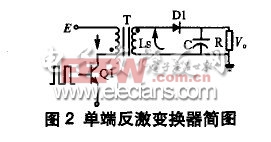
功率转换部分采用单端反激电路,结构如图2。当加到原边主功率开关管Q1的激励脉冲为高电平使Q1导通时,直流输入电压加在原边绕组两端,由于此时副边绕组相位是上负下正,整流管D1反向偏置截止,原边电感储存能量;当激励脉冲为低电平使Q1截止时,原边绕组两端电压极性反向,副边绕组相位变为上正下负,整流管正向偏置导通,变压器储存的能量向副边释放。在此开关过程中,高频变压器既起变压隔离作用,又起电感储能作用。
1.2 单片机控制系统
单片机控制系统是整个数字化电源的核心部分。
单片机采用Freescale公司的68HC908SR12,其内部资源丰富,集成了12k的程序存储器,2路定时/计数器,14通道1o位A/D转换器,PWM输出,内部温度传感器等。单片机控制系统框图如图3。
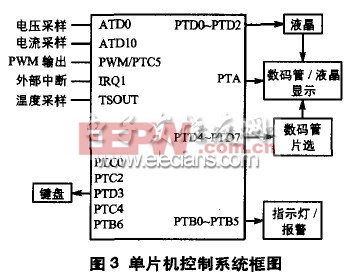
ATD0、ATD10分别是电压电流采样引脚,将采到的模拟量转化为数字量送至CPU。CPU每隔lms进行一次控制调整,从而输出占空比合适的PWM信号。PWM 信号经过驱动电路隔离放大后直接控制主电路的开关管。由于908SR12内自带脉冲宽度调制模块,PWM最大频率达到125kHz,完全可以用在高频开关电源中,8位的分辨率,可以保证输出电压电流的精度。键盘部分采用触点式按键开关,使用者可以根据自己需要在额定功率下任意调整输出电压电流值。
整个回路采用双闭环的控制系统,正常情况下电压环的反馈使输出电压恒定,一旦输出电流超出最大值,电流环使输出电压降低,输出电流维持在最大电流值。显示部分可以由数码管或液晶组成,本系统中通过按键选择分别显示电压、电流、功率、温度、电能计量等,并通过指示灯指示不同状态。在运行过程中若出现开路或短路现象,指示灯显示报警状态,CPU会立刻启动保护程序关闭主电路。同时不断检测电源内部温度,防止整机温升过高。
1.3 驱动电路设计
由于单片机输出5V 1vrL电平不足以驱动主功率开关管,并且在整个电路中原副边完全电气隔离,因此单片机输出PWM信号不能直接与主功率开关管相连。另外主功率开关管的温升直接影响到整套设备的稳定性与使用寿命。提高开关管的导通与关断速度是解决开关管温升问题最本质有效的方法。这就要求驱动电路具有以下特点:
(1)能够提供足够大的驱动电流,即驱动电路的充电电阻要充分小,以缩短导通时间;
(2)具有足够的泄流能力, 即放电电阻要充分小,以提高其关断速度;
(3)适当的驱动电压, 驱动电压一般取12V 比较合适。
考虑到原副边的电气隔离,设计了以下驱动电路,如图4。
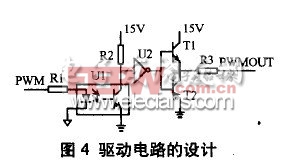
PWM为单片机输出的占空比信号,经过光耦与原边相连,满足了原副边的电气隔离要求。反相器U2实现了TTL电平到CMOS电平的转换。PWM信号为高电平时,U2输出高电平,T1导通,T2关断,驱动电源对开关管的栅源间电容充电,使之迅速达到开关管的开通阈值电压,开关管迅速导通;PWM 信号为低电平时,U2输出低电平,T1关断,T2导通,开关管栅源间电容通过T2迅速将电量放出,实现了开关管的迅速关断。该驱动电路结构简单,性能稳定且具有很高的驱动速度,可取代价格较高的驱动芯片。
2 系统软件流程
系统流程图如图5。
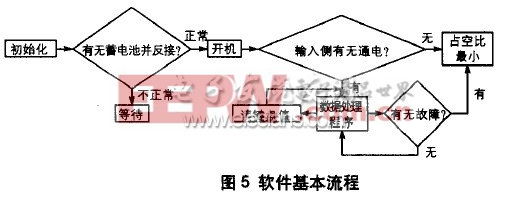
为了改进系统的动态特性及稳定性,在数据处理程序中对PWM 的占空比规定了上下限, 以防连续采样时出现较大偏差,对PWM 进行限幅处理。另外若出现意外情况,单片机会及时关断PWM,以防输出电压或电流过
开关电源 设计 数字化 智能 68HC908SR12 基于 相关文章:
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)
- 高效地驱动LED(04-23)
- 开关电源要降低纹波主要要在三个方面下功夫(06-24)
- 超宽输入范围工业控制电源的设计(10-15)