开关电源的高性能电压型PWM比较器设计
引言
随着科学技术的迅猛发展,电器设备日新月异,趋向小型化、低功耗、高效率,使开关电源需求日益增大,对电源的要求越来越高。
开关电源采用功率半导体器件作为开关,通过PWM控制开关的占空比来调整输出电压。根据定频控制方式分为电压型和电流型PWM控制,由于电压型PWM控制方式具有结构简单、易于实现等优点被广泛应用。图1所示是电压控制型开关电源的原理图,其中虚框部分是控制芯片内部结构。

图1 电压控制模式开关电源工作原理图
从图中可以看出,控制芯片有一个采用PWM调制法的电压闭环反馈,将电压误差放大器放大后的直流信号与恒定频率的三角斜波进行比较。根据脉宽度冲调制原理,得到需要的一定占空比脉冲宽度,推动开关功率管的开与关,经变压器耦合后得到恒定的输出电压。控制芯片的核心电路是PWM比较器,脉冲宽度调制信号就是由PWM比较器产生。芯片的控制速度、效率、功耗很大程度上都是由PWM比较器决定。文中设计并实现了一种新型高性能的开关电源电压型PWM比较器,具有较低输入失调电压、转换速率快、较低功耗和波形更陡。
图2是电压型PWM比较器工作波形,输入三角波接在比较器的反向输入端,误差放大器的输出信号送至比较器同相输入端,经放大后输出PWM信号。

图2 PWM工作波形图
PWM比较器电路设计
设计的PWM比较器电路原理图如图3所示。集成电路对比较器的性能要求是从响应速度、输入失调电压、功耗和面积几个方面来考虑的。
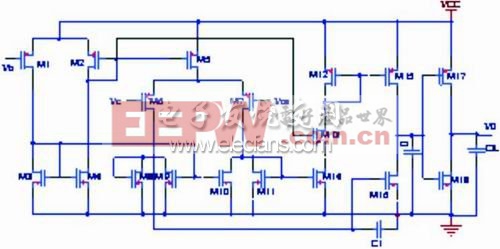
图3 PWM比较器电路图
电路中VC为控制信号,是比较器的同相输入端; VOS为振荡器产生的锯齿波信号,是比较器的反相输入端;Vb作为电路中的偏置信号,提供差分对管的偏置和有源负载;最后经过反相器输出脉冲宽度调制信号V0。图3中三个电容是为计算延迟时间画出的等效电容。
该电路用两个尺寸完全一致的具有低驱动电流能力的PMOS管作为差分输入管,它们分别控制两个NMOS管M9和M10,当VC电压值较低时,M10的栅电压较高,M9则处于临界导通状态,所以V0输出高电平。图中M8是为了防止M9栅电压过高时电流过大所设置的。该电路是双端输入转单端输出的放大电路,经差分放大后输出的微弱信号,由于信号弱,输出电压摆幅小,加入了共源共栅放大电路,末级反相器是为了增加电路的负载能力。
系统输入失调电压
电路的输入失调电压是元器件参数值的不相同造成的,其中主要是两个输入管阈值电压、导通电阻等区别产生的。为了减小工艺误差对电路性能的影响,两个输入PMOS管的面积需要做得很大,来补偿掺杂浓度、沟道调制效应、氧化层电荷密度等因素起伏的影响,本电路中采用输入PMOS管的宽长比为300mm/6mm。
对系统输入失调电压的推导,假设电路完全平衡,即Vp的输入能以和Vn输入相同的方式传送到输出端。所以,M6、M7管完全匹配,M9、M10流过M5的电流被平分流过M6、M7。即:

从上面公式可见,在工艺参数一定的情况下,增益和失调电压成反比,这就要求从几个方面综合考虑。相比之下,90倍的增益就已经满足需要了。为了减小输入失调电压,可以缩小M6的宽长比。
经仔细调整各个MOS管的宽长比,综合仿真检测,系统失调电压仅为0.118mV。
比较器速度
电路的反应速度与输入信号差的绝对值有关,该绝对值越大,反应速度也越快。该反应速度还与偏置电压有关,Vb电平很高时,差分对管流过的电流越小,对后级MOS管栅电容充放电的速度越小,比较器的反应速度降低。当Vb电平很低时,M11的偏置电压也较低,同样比较器的反应速度要下降。
比较器速度是由给寄生电容和电路电容充放电电流大小确定的。图3画出了比较器的主要寄生电容。C1是由M2与M4的漏扩散区造成的总耗尽电容;C2是由耗尽电容C1和栅源电容Cgs组成。
比较器的传输延迟主要是由三级延迟构成,第一级延迟是VDO从静态工作点跳变到第二级跳变点VTRP2所用时间。假设驱动第二级器件在跳变过程中大部分时间处于饱和区,近似认为有一恒定电流驱动寄生负载电容。求得第一级延迟为:

第二级的延迟是在第一级延迟时间结束时输出一个阶跃变化的信号,从输出任一电源跳变到下级跳变电压的时间计算出来,因而确定第二级输出速度。 求得第二级延迟为:

同样,第三级的延迟是由输出反相器产生的,延迟时间的计算主要是根据输入电压上升到50%与输出电压下降到50%的时间延迟。
因此,电路的总延迟为:

电路的功耗
电路的功耗不仅与偏置信号Vb的电平有关,还与两个进行比较的信号电平值有关,具体为Vb电平越低,电路功耗越大;输入的两个信号电平越低,电路功耗也越大。
仿真结果分析
根据以上的分析和计算,本文采用1.2μm CMOS工艺的HSP
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 适合高效能模拟应用的线性电压稳压器(07-19)
- DC-DC变换器中一种高性能振荡电路的设计(04-08)
- 弥补模拟控制器缺点的数字控制器(08-04)
- 欠压/过压锁定(08-25)
- 多重转换:冗余电源系统电流限制的一种新方法(12-24)