神经网络控制器在软开关中的应用
1引言
近年来,电力电子技术发展迅速,直流开关电源广泛应用于各个领域[1]。软开关技术尤其是软开关谐振变换器以其优越的性能已经成为直流开关电源研究中极其热门的研究方向并且得到了广泛的应用。由于在许多场合中,对于输出电压的动态响应性能要求很高,这就要求软开关功率变换器系统具有较好的动态响应能力而且能够实时地适应系统的变化。
PID控制器以其简单的结构、明确的物理参数和易于实现等优点,在新的控制理论不断涌现的今天仍然是反馈控制中最常用的方法。但是PID控制器主要的缺点就是它对被控对象的依赖性[2]。由于在系统中谐振元件的引入以及这些系统本身存在严重的非线性和时变不确定性等特点,使得传统的PID控制很难达到系统输出的要求。而神经网络源于对脑神经的模拟,具有很强的适应复杂环境变化和多目标控制要求的自学习能力,并有以任意精度逼近任意非线性连续函数的特征[3]。
据此,本文将神经网络与传统的PID相结合,利用神经网络的自学习和任意函数的逼近能力以及PID控制思想,构造一个基于PID的神经网络控制器,以提高系统的输出精度和动态响应能力。
2软开关准谐振功率变换器
本文以SEPIC零电流谐振功率变换器为控制对象,在控制回路中加入PID神经网络控制器,所设计的系统结构如图1所示。图1中Lf、Cf分别为谐振电感和谐振电容,二者可发生并联谐振。谐振电感与开关管串联,即在开关管与谐振电感中流过同一电流,若谐振电感中的电流为零时导通开关管就实现了开关管的零电流导通,即在零电流条件下实现软开关工作状态。
(1)
其中kp、ki、kd分别为比例、积分、微分系数。这些参数确定之后,不能主动适应系统的变化,若系统的条件参数一旦发生变化就不能在较佳的状态下运行。因而若将PID的控制规律与神经网络相结合,让神经网络来完成自动调整kp、ki、kd,通过网络的自身学习找到最优的控制参数。图1中所示的PID神经网络控制器的具体结构如图2所示。该控制器采用了BP神经网络结构以误差信号e(k)、e(k-1)、e(k-2)作为输入信号,而把kp、ki、kd作为隐含层的3个单元,来输出一个控制信号。这是一个3输入、单输出、一个隐含层(包含3个单元)的网络,从而实现了神经网络与PID控制规律的结合。
(2)
网络的学习目的是使目标函数J为最小,为系统给定参考值,un(k)为系统输出值,n为每批采样点数。沿负梯度方向调整连接权Wij、Wj1的修正量为
(3)
设K为迭代次数,应用梯度法可得网络各层连接权的迭代关系式为:
(4)
(5)
式(4)和(5)中等号右边的第二项为各层连接权的修正量。权值的修改过程也即是kp、ki、kd三个参数的调整过程,当输出误差满足输出精度要求时也就是获得了最优的kp、ki、kd参数设置,这样就使这三个参数实现了自适应调整,不断的改善系统的动态响应性能。为提高网络的学习效果加快收敛,在权值调整过程中引入了动量项因子,因而网络连接权的迭代关系变为如下式
(6)
其中动量项
(7)
mc为动量因子,这里将其取值为1。
图1中的PID神经网络控制器的作用就是将给定信号与反馈信号之间的误差信号e变换为控制PWM信号的电压u,进而控制功率变换器工作,并且通过不断地学习来改善控制性能。
4仿真计算与结果分析
仿真步骤如图3所示。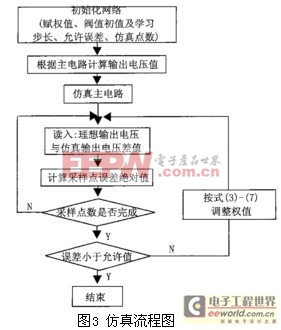
根据前两节所述的软开关准谐振功率变换器、以及其与PID神经网络控制器相结合所建立的系统结构进行仿真,仿真在数学仿真软件MATLAB提供的Simulink软件包中进行。主电路仿真参数如下:
输入电压Uin=50V,L1=1.6mH,L2=40μH,Lf=20ΜH,Cf=300nF,C1=3.9μH,Cr=47μH,R=100Ω。
(1)主开关管流过的电流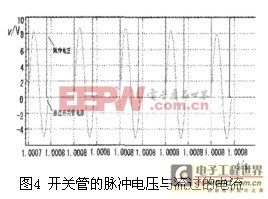
从图4可以看出,在主开关管脉冲到来之前,开关管上流过的电流已经到零,保证了功率开关管的零电流关断,这表明加入PID神经网络控制器后仍能保证主电路工作在零电流开关的工作状态。
(2)输出响应
加入PID神经网络控制器前的零电流SEPIC谐振功率变换器的输出电压响应如图5所示,纵坐标表示电压,单位为V,横坐标表示时间,单位为s。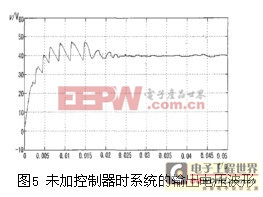
从图5中可以看出,该变换器的输出电压在0.02s后才趋于稳定。将本文所设计的PID神经网络控制器加入到主电路之后的系统响应如图6所示。由图6可以看出输出电压在0.02s前已基本趋于稳定,系统有更快的响应性能。
(3)瞬间响应
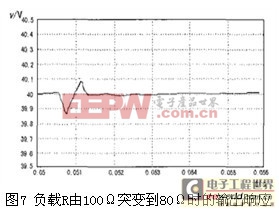
当负载电阻从100Ω下降到80Ω时的瞬间响应如图7所示。
从图7的仿真结果可以看出加入了PID神经网络控制器后,不仅可以使功率变换器的输出获得相当高的响应精度,而且在负载发生变化的情况下,跟随精度仍然很好,特别是在负载发生突变的情况下,系统能够迅速恢复稳定输出,这说明所设计的控制器具有较好的控制效果。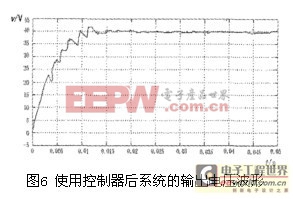
5 结论
本文提出了一种新的控制方案,将PID控制与神经网络相结合,构造出了一种新的神经网络控制器,并且应用到了软开关谐振功率变换器中。仿真结果表明,该功率变换器在PID神经网络控制器的作用下不仅能够保证主电路在软开关状态下稳定运行,并且还能提高系统的输出精度、动态响应能力和适应环境变化的能力。该控制器对系统结构发生变化时的适应能力强,克服了常规PID控制器的缺点,在软开关应用中具有更好的控制效果。
- 大功率电镀电源软开关技术的分类(12-09)
- 正反激励式准谐振软开关电源(12-09)
- 干货分享:正激有源钳位软开关电源设计(12-07)
- 以移相全桥为主电路的软开关电源设计全解(12-07)
- IGBT软开关在应用中的损耗(12-07)
- 电源技术基础:减少开关损耗的“软开关”技术(12-07)