一种改进型串级调速系统的研究与设计

图3 数字式移相触发器原理图
4 两种调速系统的仿真与比较分析
根据前面所述的传统与改进型串级调速系统的原理,以绕线式异步电动机YZR-355-L1-10作为研究对象,利用MATLAB软件分别构建仿真模型如图4和图5所示。绕线电机YZR-355-L1-10其铭牌参数如下:功率P=110kW,极对数p=5,额定电压UN=380V、额定电流IN=217A、额定频率fN=50HZ、额定功率因数cosφ=0.88、额定转速nN=582 r/min、额定转矩TN=1804 n.m、转动惯量J=17.08 kg.m2、空载电流104.3A、重量1764kg。
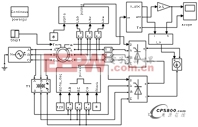
图4 改进型串级调速系统仿真模型
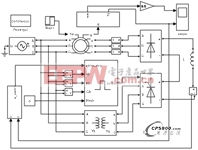
图5 传统串级调速系统仿真模型
在负载转矩为600n.m时,对传统与改进型串级调速系统启动进行仿真,启动电磁转矩如图6所示。可以看出,尽管启动时间基本相同,但是改进型串级调速系统启动时电磁转矩大于传统串级调速系统,而且转矩平滑。因此当负载变大时,改进型串级调速系统启动速度要比传统的快。

图6 改进型与传统串级调速系统启动转矩图
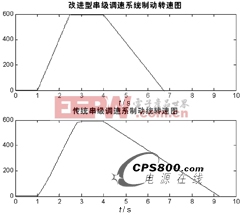
图7 改进型与传统串级调速系统制动转速图
图8 改进型串级调速系统电气制动电磁转矩图
在负载为300n.m条件下,电机启动并达到额定转速,4秒时,改进型串级调速系统通过改变转子侧和电网侧晶闸管的触发角实现电气制动,传统串级调速系统通过断电实现自然制动。两个系统制动时的转速图如图7所示,显然改进型串级调速系统的制动速度快于传统串级调速系统。改进型串级调速系统的电磁转矩图如图8所示,此时绕线电机的电磁转矩作用方向与转速方向相反,电机处于回馈制动状态。电机轴上输入的机械功率转换成电功率回馈到电网中。
综合分析,改进型的串级调速系统启动转矩大于传统串级调速系统,启动时间快,而且能够实现回馈制动,减小了制动时间,提高了生产效率。
5 结论
本文针对传统串级调速系统不能实现电气制动的不足进行了改进,并通过仿真验证了方案的可行性,为实现大功率绕线电机在频繁启动、制动的工作环境下的节能调速提供了理论依据。
参考文献
[1] 王玉彬. 电机调速及节能技术. [M] 中国电力出版社. 2008
[2] 陈伯时. 电力拖动自动控制系统——运动控制系统[M]. 机械工业出版社, 2009
[3] 郭建军. 串级调速发展与现状. 装备制造技术. 2008(7):110-111
[4] 冯晖, 林争辉. 三相全数字移相触发电路. 国外电子元器件. 2002(3): 21-23
作者简介
张兴起(1984 --),男,河北唐山,硕士研究生,主要从事港口大型电机节能控制系统的研究。■
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)