高频开关电源控制方案设计
1电压电流双环控制
为了实现输出电压电流均可控,通常采用电流模式控制,常用电流模式控制有峰值电流控制法和平均电流控制法。但是,峰值电流控制有以下几个缺点[1]:
①占空比大于50%的开环不稳定性,存在难以校正的峰值电流与平均电流的误差;
②闭环响应不如平均电流模式控制理想;
③容易发生次谐波振荡,即使占空比小于50%,也有发生高频次谐波振荡的可能性。因而需要斜坡补偿;
④对噪声敏感,抗噪声性差。因为电感处于连续储能电流状态,与控制电压编程决定的电流电平相比较,开关器件的电流信号上斜坡通常较小,电流信号上的较小噪声很容易使开关器件改变关断时刻,使系统进入次谐波振荡。
2平均电流模式控制PWM
平均电流模式采用双闭环控制,其内环控制输出滤波电感电流,外环控制输出电压,提高了系统响应速度。图1为平均电流模式控制PWM的原理图。
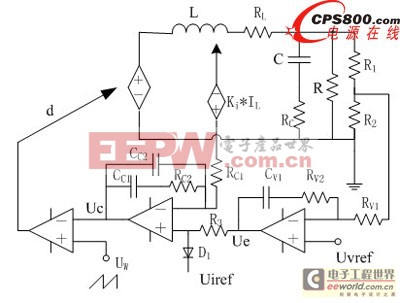
图1平均电流模式控制原理图
将误差电压信号Ue接至电流误差信号放大器的同相端,作为输出电感电流反馈的控制信号Uip。将带有锯齿纹波状分量的输出电感电流反馈信号Ui,接至电流误差信号放大器的反相端,跟踪电流控制信号Uip。Ui与Uip的差值经过电流误差放大器放大后,得到平均电流跟踪误差信号UC。再由UC与三角锯齿波信号通过比较器比较得到PWM控制信号。UC的波形与电流波形Ui反相,所以,是由UC的下斜坡(对应于开关器件导通时期)与三角波的上斜坡比较产生控制信号。显然,这就无形中增加了一定的斜坡补偿。但为了稳定工作,要求电感电流的下降坡度不能大于晶振的坡度。
平均电流模式控制的优点是:
①电感电流能够高度精确地跟踪电流控制信号;
②不需要斜坡补偿;
③调试好的电路抗噪声性能优越;
④适合于任何电路拓扑对输入或输出电流的控制;
⑤易于实现均流。
3小信号分析及电流、电压环PI调节器参数设计
这种控制方式有恒压和恒流两种工作方式。当D1导通时,电路工作在恒流模式,此时,电压环不起作用,电路相当于单环控制。当D1截止时,电路工作在恒压模式下,电路采用串级双环控制,电流环作为电压环的内环,电压环PI调节器的输出Ue作为电流环PI调节器的给定。其电路方框图如图2所示。在设计参数时,先设计电流环的调节器,获得稳定的内环,然后得到电流环的闭环传递函数Tic(s),并将其作为电压环的一个环节,如图3所示,然后设计电压环调节器。这种控制方式的最大的优点是,很好地解决了电路的限流问题,使电路具有最快的限流响应速度。但是,这种控制方式的实际限流给定是限流值Uiref加上D1的管压降,因为D1的管压降与通过它的电流有关,所以这种控制方式的稳流精度不如前面那种控制方式,但可以通过调节电阻R3,减小D1管压降的变化量,以提高这种控制方式的稳流精度。
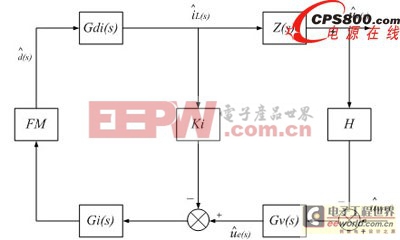
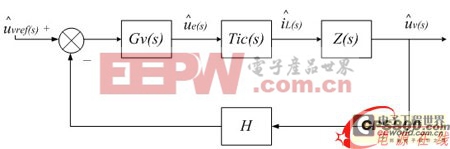
图3电压外环等效方框图
图中符号表示:
H为输出电压采样系数;
Ki为电感电流采样系数;
FM为脉宽调制器的传递函数,FM=1/Upp,(Upp为三角波峰峰值);
GV(s)为电压环PI调节器的传递函数:
忽略输出滤波电感电容等效电阻的影响后为

式中:Udc输入直流母线电压;
n为副边与原边的匝比;
L为输出滤波电感值;
RL为滤波电感的电阻;
C为输出滤波电容;
RC为滤波电容的串联等效电阻;
R为负载电阻。
Z(s)为负载和输出电容支路的并联阻抗:

由图2可得,电流环(内环)的闭环传递函数为:
补偿前,双环控制方式下电压环的开环波特图见图4。
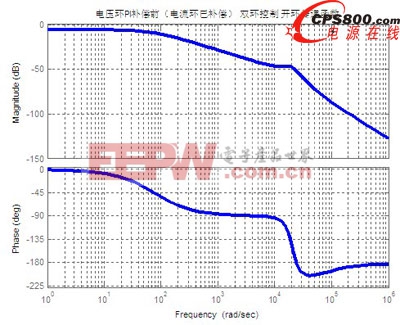
图4双环控制方式下电压环的开环波特图(补偿前)
补偿后,电压环的开环传递函数为:
Tvob(s)=HGv(s)Tic(s)Z(s)(8)
补偿后,双环控制方式下电压环的开环波特图见图5。如图5所示,系统的相位裕量为45°,稳定裕量为50dB。
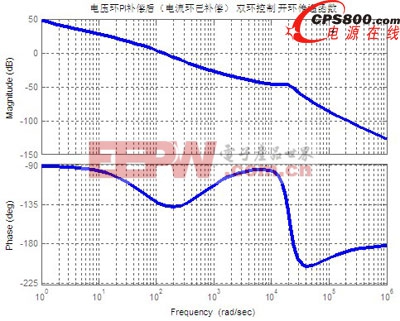
图5双环控制方式下电压环的开环波特图(补偿后)

由等效方框图图3可得,补偿前电压环的开环传递函数为:


Gi(s)为电流环PI调节器的传递函数:

Gdi(s)为主电路的占空比对电感电流的开环传递函数

图2双环控制模式下的电路方框图
4控制电路实现
采用集成芯片UC3525外加运放构成平均电流模式控制电路,并用单片UC3535外加逻辑电路的方式形成有限双极性控制的4路控制信号。如图6所示。
(1)外环控制
电压给定信号与输出电压反馈信号经运放U1补偿比较得Ue,接到UC3525的内部误差放大器正相输入端:2脚作为反馈电流的控制信号Uip。当输出电流超过给定限流值时,D11导通,Uip被嵌在给定限流值上。
(2)内环控制
采样电阻检测输出电流并通过电流检测放大器得电流反馈信号。接到UC3525的内部误差放大器反相输入端的1脚,与Uip进行比较。UC3525的9脚为反馈补偿端。
(3)有限双极性控制
- 谈高频机UPS和工频机UPS的“耐冲击能力”(12-09)
- 分析高频开关型稳压电源的电路结构(12-08)
- 详述智能高频开关电源系统的改造设计(12-08)
- 高频逆变电源(12-08)
- 高频开关电源的电磁兼容问题的解决方案(12-08)
- 详解一款高频输出不对称半桥逆变器电路(12-08)