TMS320LF2407A DSP的PFC级电路的原理与设计
电流环路补偿波德(Bode)曲线如图4所示。其中:顶部为电流环路控制单元增益Gid、Fm和KS曲线;中间为补偿器Gca增益曲线;底部为所期望的环路增益Ti曲线。功率级有一个-1的斜率,在期望的穿越频率fci上放置零点fz,可以产生一个45°的相补角。然而,由于控制环路采样和补偿延时,相补角的一部分被损失,因此将fz放置到图4所指示的位置,以补偿相补角损失。 4、PFC级数字控制器设计实例 在本设计中的系统参数如下: 输出功率PO=825W,DC总线电压VO=380V,开关频率fSW=120KHz,数字环路采用频率fS=60KHz,L=100μH,C=390μF,fCV=10Hz,fci=8KHz,输入电压最大频率fmax=200Hz,Vmax=410V,Vmin=109.95V,Vo(max)=410V,输入电流最大值Imax=2PO/Vmin=15A。 各种增益参数分别为:kf=1/410,kd=1/410,KS=1/15,Km=410/109.95=3.7286。 4.1 电流控制器履行例子 由于fci=8KHz,电流控制器量值为 电流控制器相关系数为 控制器履行的代码段如下: 4.2 电压控制器履行例子 PFC变换器负载阻抗为: 。 由于fCV=10Hz,电压控制器量值为GVEA=4.7517。 电压环路PI补偿器零点设置在10Hz,积分时间常数为:T1V=1/2π×10=15.9155×10-3。因此,完整的电压环路控制器为 控制器履行等式如下: 式中 电压控制器的履行代码段写法与电流控制器相同。 4.3 实验结果 在224Vrms输入电压下的PFC变换器输入电流波形如图5(a)所示,图5(b)所示为在100Vrms输入电压时的输入电流波形。从输入电流波形可以看出,其形状趋于标准正弦波,而且与输入电压趋于同相位,因而实现了功率因数校正。 5、结束语 采用DSP的PFC变换器设计不同于传统模拟控制设计方案,不同控制环路参数必须从模拟控制重新定义到它们的数字的履行,许多具有模拟控制经验的工程师为适应从模拟到数字环境的转变面临新的挑战。
图4 电流环路补偿波德曲线
将电流环路PI补偿器零点设置在800Hz,电流补偿器的积分时间常数为TIC=1/2π×800=198.94×10-6。因此,完整的电流环路控制器为
式中:KPi=0.1985,Kli=997.77。
分立(discrete)控制器执行等式为
Ui(n)=K0i?Ei(n)+li(n-1);
li(n)=li(n-1)+K1i?Ei(n)+Kcorri?Epii
Epii=Usi-Ui(n)
式中:当 在其它情况下,
在其它情况下,
电流控制器相关系数为 。
。 


式中,KPV=4.7517,KIV =298.56。
Uv(n)=K0v?Ev(n)+Iv(n-1)
Ivi(n)=Iv(n-1)+K1v?Ev(n)+Kcorrv?Epiv
Epiv=Usv-Uv(n)
式中,当
电压控制器的相关系数为
 。
。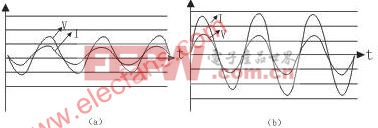
图5 输入电流和电压波形(a)224V输入;(b)100V输入
原理 设计 电路 PFC DSP TMS320LF2407A 相关文章:
- 简述数字电位器基本原理与基本特性(12-09)
- 工程师福利:倾情奉献无线充电器设计原理及BOM清单(12-09)
- 集中器侧硬件原理图设计(12-09)
- 开关电源原理与设计主要器件之开关电源变压器(12-09)
- 变频器工作原理及控制方式介绍(12-08)
- 小型UPS电源的原理与维护(12-08)