SPWM变频电源双闭环控制的设计和研究
时间:02-14
来源:互联网
点击:
1 引 言
在目前逆变电源的控制技术中,滞环控制技术和SPWM控制技术是变频电源中比较常用的两种控制方法。滞环控制技术开关频率不固定,滤波器较难设计,且控制复杂,难以实现;SPWM控制技术开关频率固定,滤波器设计简单,易于实现控制。当二者采用电压电流瞬时值双闭环反馈的控制策略时,均能够输出高质量的正弦波,且系统拥有良好的动态性能。
对于SPWM变频电源,采用电压电流瞬时值双闭环反馈的控制策略,工程中参数设计往往采用试凑法,工作繁琐,误差较大。本文详细介绍了SPWM变频电源主要的控制参数设计准则和方法,对于快捷、准确地选择合适的闭环参数,有很大的实践应用价值。
2 系统简介
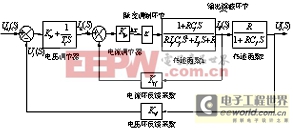
图1 双闭环控制的SPWM变频电源系统构成简化图
图1为系统构成简化图,该系统由主电路和控制电路两部分组成。逆变电源主电路采用以IGBT为开关器件的单相逆变电路, 采用全桥电路结构,经过LC低通滤波器,滤去高频成分,在滤波电容两端获得相应频率的光滑的正弦波。
虚线框包括的是控制电路,电压电流瞬时值双闭环反馈控制是由输出滤波电感电流和输出滤波电容电压反馈构成的。其外环为输出电压反馈,电压调节器一般采用PI形式。电压外环对输出电压的瞬时误差给出调节信号,该信号经PI调节后作为内环给定;电感电流反馈构成内环,电流环设计为电流跟随器。电流内环由电感电流瞬时值与电流给定比较产生误差信号,与三角形载波比较后产生SPWM信号,通过驱动电路来控制功率器件,保证输出电压的稳定,形成典型的双环控制。
在实际应用中采用电流内环之外还设置电压外环的目的除了降低输出电压的THD外,还在于对不同负载实现给定电流幅值的自动控制。
3 SPWM变频电源的线性化模型
由于SPWM变频电源中存在着开关器件,因此是一个非线性系统,但因为一般情况下,SPWM变频电源的开关频率远高于调制频率,故可以利用传递函数和线性化技术,建立起SPWM变频电源的线性化模型[1],如图2所示。图中,脉宽调制环节由脉宽信号产生环节和功率电路环节组成,一般可以等效为一个线性比例环节,用K表示,其输入为正弦控制电压,输出是等效的正弦调制电压。输出滤波环节由滤波电感Lf和电容Cf组成,为分析方便,取负载为阻性负载。电流环的反馈取自输出滤波电感的电流,为此滤波环节的传递函数可改写为两个环节的串联,以UAB(S)为输入, Ilf(S)为输出及以Ilf(S)为输入,Uo(S)为输出,求出相应的传递函数如图2中传递函数1和传递函数2。
图2 SPWM变频电源系统的数学模型
4 闭环设计
电压、电流双闭环控制系统是一种多环系统,设计多环系统的一般方法是:从内环开始,逐步向外扩大,一环一环地进行设计。先从电流环入手,设计好电流调节器,然后把电流环看作是电压调节系统中的一个环节,再设计电压环,因此首先进行电流环的设计实现[2]。相应的性能指标为输出功率500VA,功率管开关频率25K,频率变化范围15~1000Hz,输出电压为220VAC。滤波器参数Lf为1.6mH,Cf为2u。
4.1电流环的设计
从图2中,可得未加补偿校正环节的电流环开环传递函数:
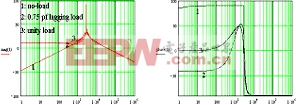
图3(a)为校正前电流环开环在空载、感性载(φ=0.75)、满载下的幅相曲线[3]。从图中可以看出,开环频率特性的相移小于90ordm;,因此理论上电流闭环对任何的开环增益都是稳定的。电流环的设计必须保证电流闭环具有较好的稳定性,同时具有较快的动态响应和抗噪声干扰能力。
(a)校正前电流环开环幅相曲线
(b)校正后电流闭环幅相曲线
图3 校正前后不同负载时电流环幅相曲线
加了补偿环节后,电流闭环的传递函数:
其中,Kif为电流环反馈系数,根据输出电压和功率确定这儿取为0.01。图4为不同的Kip值下电流内环的幅相曲线,能够看出增大前向通道的调节器增益Kip可以扩大带宽范围,但会导致系统的抗噪声干扰能力下降,使得电流内环的增益值变大,同时也会降低系统的稳定性,不利于电压环设计,所以调节器增益也应适当选取,满足所需的带宽要求即可,可选择Kip=6。
图4 不同的Kip值下电流闭环幅相曲线
图3(b)给出了Kip=6时,不同负载的电流闭环幅相曲线,从仿真曲线可以看出电流内环具有带通滤波器的特性,且除空载具有更宽的带宽外带宽基本不受负载变化的影响。
4.2 电压环的设计
由图2,可得未加电压调节器的系统的等效开环传递函数:
其不同负载下系统的幅相曲线如图5(a)所示,可以看出,系统低频增益很小,输出稳态误差很大,高频衰减不快,因而需要加入适当的补偿环节加以校正,通常可采用PI控制器作为电压调节器。电压环设计希望校正后系统低频增益尽可能高,以尽量减小输出正弦电压的稳态误差;同时也希望尽可能消除高频分量的影响,其高频衰减尽可能快,且系统还需具备适当的相角裕度,截止频率ωc足够大,可以保证较快的动态响应[4]。
在目前逆变电源的控制技术中,滞环控制技术和SPWM控制技术是变频电源中比较常用的两种控制方法。滞环控制技术开关频率不固定,滤波器较难设计,且控制复杂,难以实现;SPWM控制技术开关频率固定,滤波器设计简单,易于实现控制。当二者采用电压电流瞬时值双闭环反馈的控制策略时,均能够输出高质量的正弦波,且系统拥有良好的动态性能。
对于SPWM变频电源,采用电压电流瞬时值双闭环反馈的控制策略,工程中参数设计往往采用试凑法,工作繁琐,误差较大。本文详细介绍了SPWM变频电源主要的控制参数设计准则和方法,对于快捷、准确地选择合适的闭环参数,有很大的实践应用价值。
2 系统简介

图1为系统构成简化图,该系统由主电路和控制电路两部分组成。逆变电源主电路采用以IGBT为开关器件的单相逆变电路, 采用全桥电路结构,经过LC低通滤波器,滤去高频成分,在滤波电容两端获得相应频率的光滑的正弦波。
虚线框包括的是控制电路,电压电流瞬时值双闭环反馈控制是由输出滤波电感电流和输出滤波电容电压反馈构成的。其外环为输出电压反馈,电压调节器一般采用PI形式。电压外环对输出电压的瞬时误差给出调节信号,该信号经PI调节后作为内环给定;电感电流反馈构成内环,电流环设计为电流跟随器。电流内环由电感电流瞬时值与电流给定比较产生误差信号,与三角形载波比较后产生SPWM信号,通过驱动电路来控制功率器件,保证输出电压的稳定,形成典型的双环控制。
在实际应用中采用电流内环之外还设置电压外环的目的除了降低输出电压的THD外,还在于对不同负载实现给定电流幅值的自动控制。
3 SPWM变频电源的线性化模型
由于SPWM变频电源中存在着开关器件,因此是一个非线性系统,但因为一般情况下,SPWM变频电源的开关频率远高于调制频率,故可以利用传递函数和线性化技术,建立起SPWM变频电源的线性化模型[1],如图2所示。图中,脉宽调制环节由脉宽信号产生环节和功率电路环节组成,一般可以等效为一个线性比例环节,用K表示,其输入为正弦控制电压,输出是等效的正弦调制电压。输出滤波环节由滤波电感Lf和电容Cf组成,为分析方便,取负载为阻性负载。电流环的反馈取自输出滤波电感的电流,为此滤波环节的传递函数可改写为两个环节的串联,以UAB(S)为输入, Ilf(S)为输出及以Ilf(S)为输入,Uo(S)为输出,求出相应的传递函数如图2中传递函数1和传递函数2。
4 闭环设计
电压、电流双闭环控制系统是一种多环系统,设计多环系统的一般方法是:从内环开始,逐步向外扩大,一环一环地进行设计。先从电流环入手,设计好电流调节器,然后把电流环看作是电压调节系统中的一个环节,再设计电压环,因此首先进行电流环的设计实现[2]。相应的性能指标为输出功率500VA,功率管开关频率25K,频率变化范围15~1000Hz,输出电压为220VAC。滤波器参数Lf为1.6mH,Cf为2u。
4.1电流环的设计
从图2中,可得未加补偿校正环节的电流环开环传递函数:
图3(a)为校正前电流环开环在空载、感性载(φ=0.75)、满载下的幅相曲线[3]。从图中可以看出,开环频率特性的相移小于90ordm;,因此理论上电流闭环对任何的开环增益都是稳定的。电流环的设计必须保证电流闭环具有较好的稳定性,同时具有较快的动态响应和抗噪声干扰能力。

加了补偿环节后,电流闭环的传递函数:
其中,Kif为电流环反馈系数,根据输出电压和功率确定这儿取为0.01。图4为不同的Kip值下电流内环的幅相曲线,能够看出增大前向通道的调节器增益Kip可以扩大带宽范围,但会导致系统的抗噪声干扰能力下降,使得电流内环的增益值变大,同时也会降低系统的稳定性,不利于电压环设计,所以调节器增益也应适当选取,满足所需的带宽要求即可,可选择Kip=6。
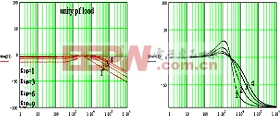
图3(b)给出了Kip=6时,不同负载的电流闭环幅相曲线,从仿真曲线可以看出电流内环具有带通滤波器的特性,且除空载具有更宽的带宽外带宽基本不受负载变化的影响。
4.2 电压环的设计
由图2,可得未加电压调节器的系统的等效开环传递函数:

其不同负载下系统的幅相曲线如图5(a)所示,可以看出,系统低频增益很小,输出稳态误差很大,高频衰减不快,因而需要加入适当的补偿环节加以校正,通常可采用PI控制器作为电压调节器。电压环设计希望校正后系统低频增益尽可能高,以尽量减小输出正弦电压的稳态误差;同时也希望尽可能消除高频分量的影响,其高频衰减尽可能快,且系统还需具备适当的相角裕度,截止频率ωc足够大,可以保证较快的动态响应[4]。
- 简述交流变频电源基本知识与选择参考(12-08)
- 浅析变频电源与变频器的区别(12-08)
- 变频电源分类及其应用领域详细介绍(12-08)
- 交流变频电源基本知识与选择参考(12-08)
- 变频电源注意事项(12-08)
- 变频电源的谐波危害及解决措施(12-08)