数字控制全桥软开关电源的Saber仿真分析
系统超前臂的驱动时序一致。图中switchpwm1模块相当于一个多路开关,其工作过程为:在超前臂脉冲由低变高时,接通输入端,采样反馈的偏移量,然后立刻脉冲模块由高变低接通有离散保持作用的延时模块zdelay,最后通过减法模块zsub减去固定常数k (由z_ dc模块产生) ,经过延时模块所设定的保持时间t后,所减结果再减去常数k,相减后的结果传送到移相模块shiftpwm1。

图7 移相PWM调制模型。
switchpwm1和shiftpwm1两个模块都是通过Saber与Simulink协同工作的,它们通过调用S 2fuctiON来实现具体功能。将S函数样本文件中的sys =mdlOutputs( t, x, u)作简单修改即可。
3 仿真结果
系统输入直流电压为580 V,工作频率20 kHz,开关管并联电容c1~c4取47 nF,设定漏感lr = 10μH,比例参数Kp = 1,积分参数Ki = 0. 15,输出滤波电感lo1 = lo2 = 0. 5μH,滤波电容co = 82 mF,变压器匝数比n = 10.设定负载为2. 4 m欧,输出电压vo = 12 V,输出电流io = 5 000 A.

图8 开关管驱动波形图
图8所示为开关管的驱动波形图。q1和q3为超前臂开关管,互补导通180°(具有一定的死区时间) , q2和q4为滞后臂开关管,它们分别对q1和q3有一定的移相时间。
图9所示为变压器原边电压和电流波形,分析可得,该仿真系统的原边电压与电流波形与移相控制全桥ZVS2PWM变换器的工作原理是一致的。
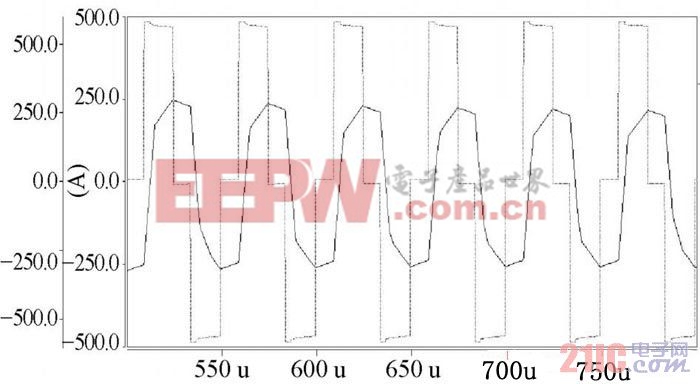
图9 变压器原边电压与电流波形
图10所示为输出为12 V /5 000 A时,超前臂开关管q1和滞后臂开关管q2的导通和关断情况。
为便于分析,将驱动电压ugs1 和ugs2 放大30 倍。
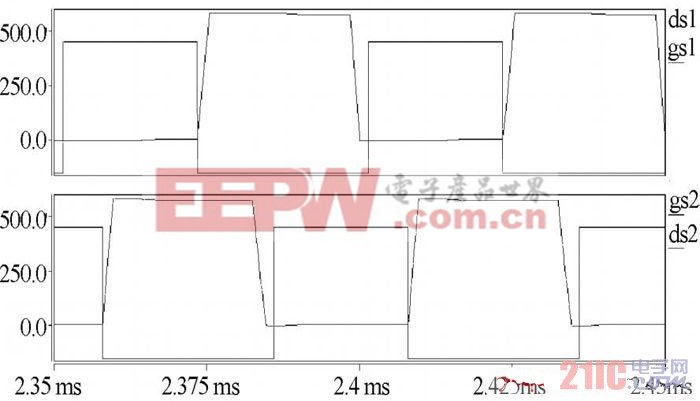
图10 开关管q1、q2的导通和关断情况。
从图10中可以看出,无论开关管q1和q2,在导通之前,D、S两端的电压uds已降为零,说明开关管实现了零电压导通;在开关管关断之后, uds开始线性上升,说明开关管实现了零电压关断。
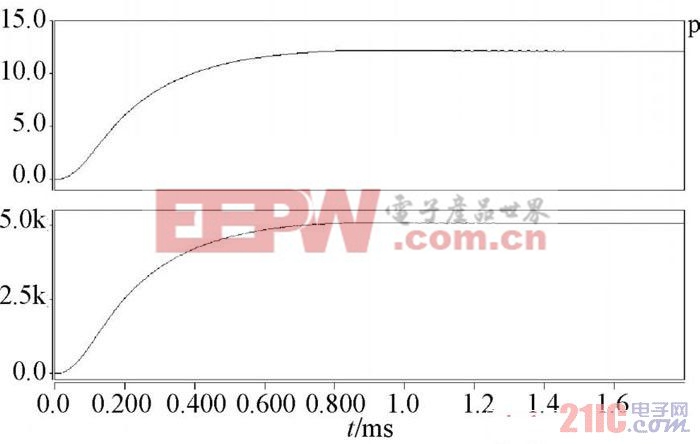
图11 输出电压电流波形。
图11所示为本仿真系统的输出电压和电流波形。由该结果可知,在112 ms左右输出电压达到12V稳态值,输出电流达到5 000 A稳态值。电压波形超调量小于0124 V,电流波形超调量小于100 A,满足电压上下波动2%的性能指标。
4 结论
通过仿真研究清楚的了解大功率开关电源系统的工作过程和工作特性,为数字电源的开发提供了重要参考依据,并能有效节省开发成本,缩短研发周期。
仿真 分析 Saber 开关电源 控制 全桥软 数字 相关文章:
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源SOC:或许好用的“疯狂”创意(07-24)
- DC-DC变换器中一种高性能振荡电路的设计(04-08)
- 驱动HB LED的分立元件降压变换器(08-04)
- DC/DC电源管理应用中的功率MOSFET的热分析方法(12-10)
- 基于BCM的有源功率因数校正电路的实现(03-12)