未知负载情况下PWM逆变器的自适应重复控制
时间:03-07
来源:互联网
点击:


其中g是介于0和1之间的常数,

3 自适应重复控制系统
图4为自适应重复控制方案,除传统的重复控制器外,控制环路中还包括自适应参数调谐器。
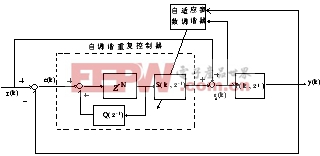
P(k,

式中


许多参数估计方法都已成功地应用于“识别”问题。其中递归最小二乘估计量(RLSE)的优点在于没有偏差,快速收敛,所以它广泛地应用于其它统计估计理论难以应用的场合。在自适应控制系统应用中,所要考虑的最重要的因素就是能否实现具有容许采样率的设计控制规律。本文所使用的(RLSE)参数识别算法为:




其中


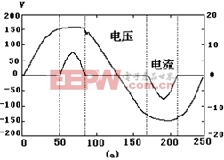
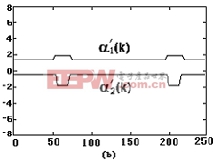

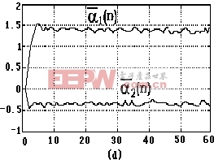
在交流调节器中,PWM逆变器通常与桥式整流器RC负载相连,其输出波形如图5(a)所示。图5(b)为式(12)中使用了RLSE的估计参数,从中我们可以看出,只要整流器的开关状态改变,就会产生具有大幅振荡的迅速收敛现象。为了避免这种现象的发生,一种办法就是当检测到负载变化时,便用一组额定的参数来设置RLSE的参数。图5(c)为式(12)中使用了改进RLSE的估计参数。图5(d)为使用了改进RLSE方法的平均模型的估计参数,它可由以下算法得到:
式中N表示输出波形在半个周期内的采样次数。通过对估计参数



4 PWM逆变系统的建模与控制
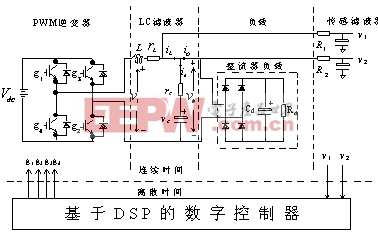
图7给出了基于DSP的数控PWM逆变系统的硬件结构,它将H型PWM逆变器,LC滤波器以及整流型RC负载结合在了一起。
4.1 设备建模
图中电容电压



因为在电容电压和感应电流中存在开关波纹。考虑到这些滤波器的动态特性,可得到:

从(19)到(22)可以看出,设备的状态方程和输出方程可表示为:


其中





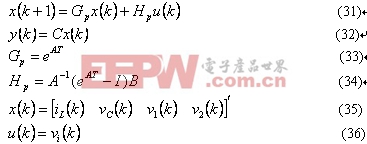
其中T为采样周期
4.2 状态反馈控制
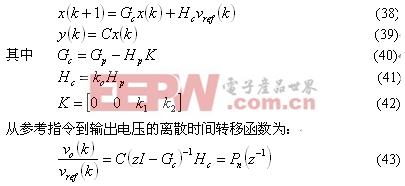
状态反馈控制框图如图8所示,控制规律可由下式得到:

式中



4.3 应用实例

表1所列为PWM逆变系统的一些主要参数,该系统所使用的是频率为50Hz,有效值为110V的交流电压。为实现自适应重复控制,系统采用了德州公司的单片DSP TMS320C14 。数字控制器的采样频率为15KHz,在正弦输出的一个波形内采样250次。自适应参数调谐器的调谐频率为120KHz,它在每半个循环内对重复控制器的控制参数进行一次调整。状态反馈增益








闭环控制的PWM逆变器的转移函数已经用RLSE的方法加以确定,确定的设备模式


图9(a)显示了频率






5 仿真和实验结果
图10所示为使用了自适应重复控制方案的DSP控制的PWM逆变器。其中(a)为与桥式整流器负载连接的PWM逆变器输出波形的三维图。所提出的控制方案有助于消除周期失真,且经补偿后的交流电压输出波形更接近于标准正弦波。



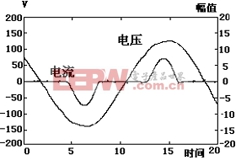

自适应重复控制方案的实验证实是在一台与整流器RC负载相连接的2KVA PWM逆变器上进行的(电流振幅因数为3)。图11(a)显示了PWM逆变器输出电压和电流的实验结果,它只采用了数字状态反馈控制;而(b)图为使用了重复控制器后在同样负载条件下产生的结果。图12显示了在收敛过程中,使用了重复控制的PWM逆变器输出的交流电压误差。本文所提出的方案还有助于降低由循环扰动所引起的周期误差,可以看出对周期误差的调整共需要12次循环。对于50Hz的输出来说,这相当于用0.2秒来抑制由逐级变化的整流器RC负载所引起的周期扰动。
6 结语
本文所提出的自适应重复控制方案成功的应用到了高性能交流电源PWM逆变器的闭环调节中。从仿真和实验的结果都可以看出,这种控制方案能有效的消除由未知周期扰动所引起的周期性波形失真。与传统的重复控制方法相比较,自适应重复控制方案不仅能得到更快的收敛速度,而且即使在负载变化很大的情况下,也能够保证其足够的稳定性。在使用了自适应重复控制器之后,电流振幅因数为3的整流器RC负载的THD在0.2秒内,从8%下降到了1%.
参考文献
[1] C.Hua and R.G. Hoft,“High performance deadbeat controlled PWM inverter with parameter estimation using a current source compensator for nonlinear loads,”in IEEE PESC Conf.Rec., 1992, pp.443-450.
[2]B.A.Francis and W.M.Wonha“The internal model principle for linear multivariable regulators, ”Appl.Math.Opt.,vol.2.pp.170-194,1975.
[3] [美]]simon Haykin. 自适应滤波器原理(第三版). 电子工业出版社, 1998.
[4] 游志青,陈宏,胡育文.UPS逆变器的重复控制器参数的仿真分析.电源世界2002(3)
[5] 张凯,康勇,熊健,陈坚.UPS逆变电源重复控制技术研究.华中理工大学学报 Vol.28,NO.6,pp.34-36.
[6] S.Jung,L.H.Ho,H.C.Yeh,and Y.Y.Tzou,“DSP-based digital control of a PWM inverter for sine wave tracking by optimal state feedback technique, in IEEE PESC Conf.Rec.,1994,pp.546-551.
[7] Texas Instruments.TMS320C14 DSP Controllers Reference Set.CPU,System,and Instruction Set,1997.
[8] 李兰友等. 数字信号处理单片机及其应用.电子工业出版社, 1997.
自适应重复控制 数字信号处理控制 脉宽调制逆变器 相关文章:
- 电源设计小贴士 1:为您的电源选择正确的工作频率(12-25)
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)