基于电磁场检测的寻迹智能车系统设计
摘要:介绍智能车竞赛中电磁组的设计思路,论述了基于变参数的PD算法的信号处理方法;分析了传感器布局对转角的影响,提出直接采集交流信号的寻迹方案,并验证了该方案的效果。实验表明:该处理方法实现简单,能够比较精准、快速地跟踪通电导线的轨道。
关键词:磁场;智能车;传感器;PD算法
1 设计原理
1.1 磁场理论
根据麦克斯韦电磁场理论,交变电流会在周围产生交变的电磁场。智能车竞赛使用路径导航的交流电流频率为20 kHz,产生的电磁波属于甚低频(VLF)电磁波。交变磁场分析复杂,并且赛道导航电线和小车尺寸远远小于电磁波的波长,电磁场辐射能量很小,能够感应到电磁波的能量也非常小。所以可将导线周围变化的磁场近似地看作缓变的磁场,按检测静态磁场的方法获取导线周围的磁场分布,进行位置检测。
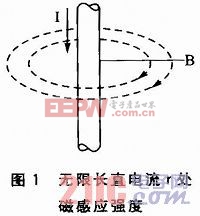
由毕奥一萨伐尔定律可知,通有稳恒电流I、长度为L的直导线周围会产生磁场,距离导线距离为r处的磁感应强度为:
基于不同物理效应的磁测量传感器很多,要根据被检测磁场的性质和要求,使用不同的磁场传感器。感应线圈对磁场的变化灵敏度较高,同时也可根据被测磁场的形态和分布选定线圈形状和几何尺寸。选用灵敏度更高的线圈作为识别信号的传感器。
本设计中导线通过的电流频率为20 kHz,且线圈较小。设线圈中心到导线的距离为r,并认为小范围内磁场分布是均匀的。再根据图1所示的导线周围磁场分布规律,利用法拉利定律,线圈中感应电动势可近似为:

即线圈中感应电动势的大小正比于电流的变化率,反比于线圈中心到导线的距离。故导线左右两端传感器的电压值可表示为:
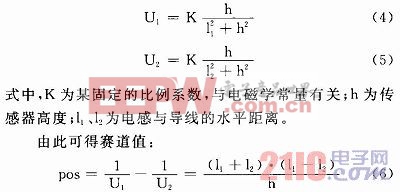
式中,(l1+l2)为定值,计算出的pos值为以传感器轴中心为坐标原点的赛道位置值。
2 磁导航智能车系统
磁导航智能车系统主要分为主控模块、路径信息采集模块、电机驱动模块和电源模块等。磁导航智能车结构框图如图2所示。
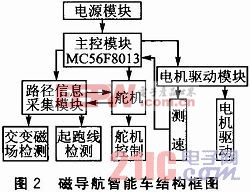
系统磁场环境为埋设在跑道中通过20kHz、100 mA交变电流的导线产生的交变磁场。
3 赛车布局分析及硬件电路
3.1 传感器布局
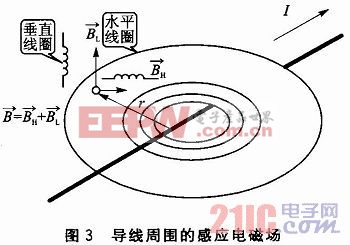
根据感应线圈安放位置的不同,可将感应方向分解为各分量。如图3所示,当线圈为水平安置时,线圈中检测到的主要是水平方向的磁场分量;线圈为垂直安置时,线圈中检测到的主要是垂直方向的磁场分量。通过对不同方向磁场分量的检测,可以获得磁场的强度和方向。
当线圈为水平安置时,检测到的感应电动势如图4所示。磁场强度B是距离x的偶函数,并且在Y轴两侧单调。当线圈为垂直安置时,检测到的感应电动势如图5所示。磁场强度B是距离x的奇函数,但在Y轴两侧没有单调关系。

系统采用的是水平安置的方法,主要利用其单调性,软件分析更直观。设计初期,选用了单排水平安装方式1,如图6所示。

在如上布局中,只通过两端传感器的电压差来计算赛车的位置,赛车就能完成基本任务。
优势:信号采样时间短;系统的实时性好,对微小变化反应及时;算法简单,控制灵活。
劣势:因线圈在磁场中的磁感应强度会受与导线的夹角影响,使得传感器在不同位置获得的电压差值相同,造成误识别;转角不够平稳。为了解决上述问题,提出了增多传感器的方案,传感器的安装方式2如图7所示。
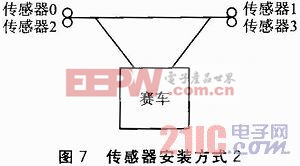
传感器0和2、传感器1和3分别成一定角度固定在赛车前方30 cm的两侧。这样有效地避免了在大S等赛道上因夹角造成的丢线问题。但速度仍受限。
笔者从布局和算法两方面入手。进一步改进,传感器安装方式3如图8所示。

系统采用了双排的传感器排布方案。前排4个传感器,后排2个传感器。传感器0、2与传感器1、3分别位于赛车前方30 cm处,间距为25 cm;传感器4、5分别位于赛车前方20 cm处,间距为20 cm。
两排传感器用法基本相同,位于前排的传感器主要用于对赛道位置的计算;位于后排的传感器用于当小车偏离量比较大时对位置进行辅助控制,同时辅助调节速度。
3.2 信号选频放大
利用电感线圈得到的感应电动势信号太弱,需要对采集后的信号进行放大、滤波处理。对交变信号的识别主要利用的是RLC并联谐振
电路,等效电路如图9所示。

R为电感的等效电阻,E为感应电动势,C是并联谐振电容。电路谐振频率为:
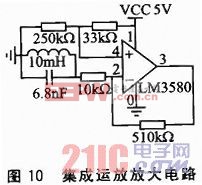
信号放大采用的是集成运放。虽然普通运放的频率响应速度较低,但在实验中发现,放大倍数对信号采集的影响不是很大,只要能够满足采样的电压要求即可。同时,使用集成运放能够有效地隔离电路,引入的干扰少。在实验中,利用集成运放进行半波放大和全波放大,发现全波放大效果更好,灵敏度较高,信号失真较小。集成运放放大电路如图10所示。
3.3 电机驱动电路
电机驱动电路选用了驱动芯片BTS7960。芯片在工作时,阻抗典型值为16 mΩ(IOUT=9 A,Tj=25℃),可提供的最大驱动电流为43A。
- 控制系统中常见的几种地线详解(10-13)
- VxWorks操作系统的CompactPCI测试仿真系统(12-12)
- 基于VxWorks操作系统的CompactPCI仿真系统(12-12)
- 电源系统管理中数字可编程 DC/DC 转换器的精确度探讨(12-12)
- 工程师详解测控系统仿真与测控设备软件化技术(12-12)
- 一种新型自动抄表系统数据集中器的设计(12-09)