基于TMS320F2812的高频链逆变器控制系统
摘要:采用全桥双向电流源高频链逆变器的拓扑结构,并对此逆变系统进行了研究和设计。该逆变器以TI公司生产的TMS320F2812芯片为控制核心,详细介绍了DSP外围调理电路的硬件设计方案及软件实现方式,在采用电压瞬时值反馈的单闭环控制方式的基础上使逆变器实现了能量的双向流通。整个电路的控制由一片TMS320F2812芯片完成,实现了电源的全数字化控制。最后制作了容量为250 VA的实验样机,实验结果验证了该逆变器及其控制方式的可行性和有效性。
关键词:逆变电源;高频链逆变器;TMS320F2812;SPWM
0 引言
随着逆变技术的不断发展,高频链逆变器在航空、电信、军事等领域的应用越来越广泛。与传统的逆变技术相比,高频链逆变技术应用高频变压器代替传统的工频变压器,有体积小,重量轻,转换效率高等优点,因此应用前景广泛。高性能数字信号处理(DSP)芯片的出现和控制理论的普遍发展,使得逆变电源朝着全数字化、智能化方向发展。本文以TMS320F2812高性能DSP控制器为核心,设计了高频链逆变器的控制系统及部分硬件电路,该逆变电源的主电路采用全桥双向电流源高频链逆变器的拓扑结构,选择电压瞬时值反馈的单闭环控制方案,可实现能量的双向流通。实验结果表明了该控制策略的可行性及有效性。
1 高频链逆变电源的拓扑和原理
全桥双向电流源高频链逆变器的主电路拓扑结构如图1所示,它由高频逆变器、高频变压器和周波变换器3部分组成。工作时,按能量传递方向来看,该逆变器工作在两个不同状态。当输入电源向负载传递功率时,高频链逆变器将直流电压能源变换为脉动的电流能量存储在储能式高频变压器中,周波变换器将该高频脉动电流低频解调,经滤波后得到低频交流电,供电给负载。负载向输入电源回馈能量时,高频逆变器工作在整流状态,周波变换器工作在调制状态。
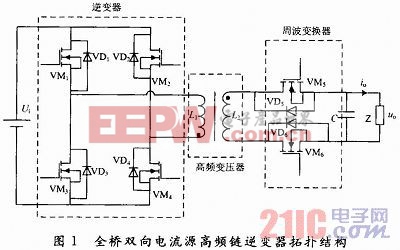
全桥双向电流源高频链逆变器是以反激式(Flyback)功率变换器的拓扑结构为基础的。按照输出电压uo和输出电流io的极性划分,该逆变器具有4种工作模式A,B,C,D,每一种工作模式的结构拓扑都相当于一个Flyback功率变换器,而且对于不同的负载,逆变器的工作模式顺序不同。
当uo>0,io>0时,逆变器工作在模式A,VM1和VM4高频斩波,VM5常通。Ui,L1,L2,VM1,VM4,VM5,VD6,C,Z构成一个Flyback变换器,电源Ui向负载Z传输能量。
当uo0,io>0时,逆变器工作在模式B,VM5高频斩波,VM6常通。Li,L1,L2,VM5,VM6,VD1,VD2,VD3,VD4,C,Z构成一个Flyback变换器,负载Z向电源Ui回馈能量。
当uo0,io0时,逆变器工作在模式C,VM2和VM3高频斩波,VM6常通。Ui,L1,L2,VM2,VM3,VM6,VD5,C,Z构成一个Flyback变换器,电源Ui向负载Z传输能量。
当uo>0,io0时,逆变器工作在模式D,VM6高频斩波,VM5常通。Ui,L1,L2,VM5,VM6,VD1,VD2,VD3,VD4,C,Z构成一个Flyback变换器,负载Z向电源Ui回馈能量。
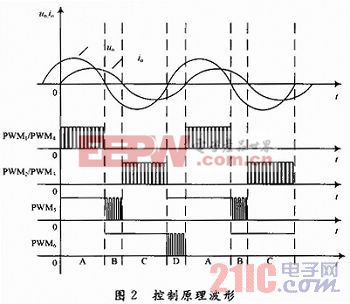
当逆变器带感性负载时,输出电流的基波分量io落后于输出电压uo,其控制原理波形如图2所示。从图中可以清晰地看到,控制原理波形与上述4种工作模式是一一对应的。逆变器工作顺序为A→B→C→D。
2 高频链逆变电源控制系统
2.1 控制系统的总体结构
控制系统以TMS320F2812为核心,主要包括电压模拟量采样电路、电压电流过零信号检测电路和MOSFET驱动电路等。现场采集到的电压模拟量经过模拟信号调理电路送入DSP的ADC单元,由DSP定时采样并完成A/D转换,DSP将A/D转换后的数据与参考正弦电压信号做比较得到误差信号,再根据DSP捕获单元捕获到的系统输出电压电流过零信号情况,输出脉冲信号至驱动电路,完成对主电路的控制。
2.2 控制系统的硬件电路
2.2.1 电压、电流检测及调理电路
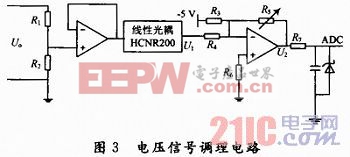
系统需要检测输出电压的瞬时值及输出电压过零信号和输出电流过零信号,作为反馈变量至DSP。系统输出电压采集电路使用线性光耦HCNR200实现隔离采样。HCNR200具有高线性度、低成本、高稳定度及可灵活设计等优点,适合采样电路的工作要求。该电压采集系统中,先将输出电压分压,然后经过线性光耦HCNR200实现反相采集信号,幅值为1;再经过反相比例加法器使得采集到的交流电压信号大小在0~2.5 V之间,中心值为1.25 V;再经过限幅保护送至DSP的A/D端。电压检测电路图如图3所示。
输出电流过零信号采集电路的主要原理是利用运算放大器的饱和截止特性,将电流霍尔传感器LA58-P采集到的电流信号反相比例放大,通过选择较大的放大倍数,使运算放大器工作在饱和状态,这时输出波形近似双极性方波,再经过IN4148二极管
控制系统 逆变器 高频 TMS320F2812 基于 相关文章:
- 控制系统中常见的几种地线详解(10-13)
- STM32激光电源控制系统设计(12-09)
- 电机驱动 控制系统(12-05)
- PC机智能家电控制系统电路设计详解(12-05)
- 工程师需要了解的知识:控制系统的稳定性标准(01-17)
- 基于DSP的变频调速控制系统的软件设计(12-14)