无互连线逆变器并联系统均流分析
1 引言
目前,使用特种电源供电的装备要求供电电源系统具有高可靠性和大功率化,这两者都与逆变电源的并联运行控制密切相关。
逆变器并联控制技术种类繁多,其中基于电压幅值和频率下垂特性的无互连线控制策略[1][2][3],由于模块之间没有通信线之间的相互干扰,对并联逆变器的位置也没有严格的限制而成为近几年的研究热点。当逆变模块参数一致时,应用下垂特性控制方案可以达到很好的均流效果;但实际中各逆变模块参数不可能完全一致,这将会导致功率不能均分。本文深入分析了逆变器参数不一致造成功率不能均分的原因,并给出了相应的改进方法以提高功率均分精度。
2 单台逆变器控制原理
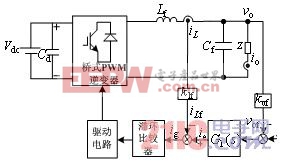
图1 单台逆变器框图
典型的逆变器通常由一直流电压源,桥式(文中为半桥)PWM逆变器和 输出滤波器组成。图1为单台逆变器框图。单台逆变器控制电路采用电压电流双闭环反馈控制方式,电压外环采用传统的PI调节(图1中用G1(s)表示),电流内环采用电感电流瞬时值反馈控制,利用两态滞环电流跟踪方式。当调制频率足够高时(远高于输出滤波器频带宽度),电流环可以等效为一个电流跟随器,即相当于一个比例环节k[4]。
3逆变器输出功率不平衡分析
3.1 功率理论
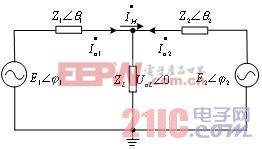
图2 逆变器并联系统等效电路
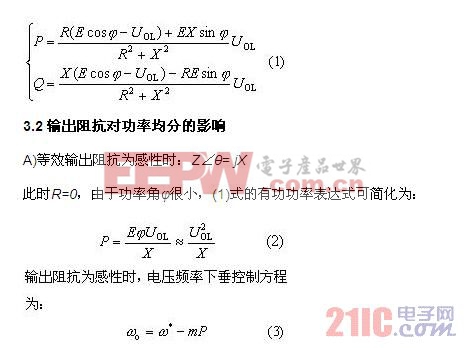
两逆变器组成的并联系统等效模型如图2所示,其中E1∠φ1和E2∠φ2分别是两台逆变器空载输出电压;UOL∠0是并联汇流条电压;Z1∠θ1和Z2∠θ2是逆变器等效输出阻抗,它由逆变器输出阻抗和逆变器连接到交流母线的线路阻抗两部分组成;ZL是负载阻抗。设Z1∠θ1=R1+jX1,Z2∠θ2= R2+jX2。由功率的物理意义可得并联中逆变器发出的有功功率P和无功功率Q的表达式为:
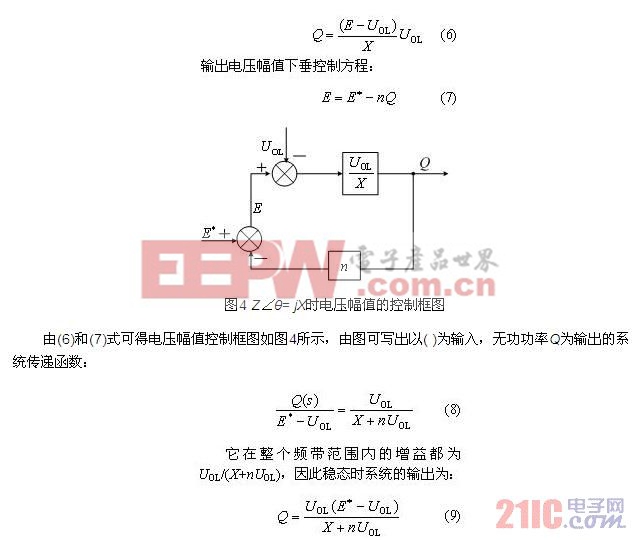
由(2)、(3)两式可画出等效输出阻抗为感性时电压频率控制框图如图3所示,逆变器输出频率ωo对时间积分与交流母线电压频率ωn对时间积分之差即为E∠φ与UOL∠0的相位差 ,则由图3可得到以空载频率 和总线电压频率ωn为输入,输出有功功率P为输出的系统传递函数:
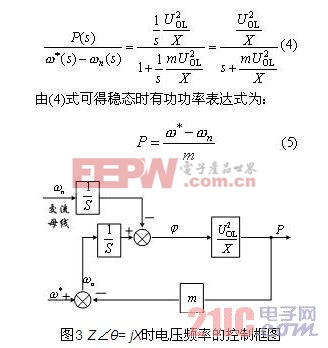
式(5)说明稳态时逆变器输出的有功功率与连线阻抗X无关,即使各逆变器与负载间的连线阻抗大小各不相同,通过对频率的下垂控制,它们输出的有功功率仍能相等。
同样的根据(1)式可得此时无功功率的表达式:
由式(9)可得稳态时输出无功功率与连线阻抗有关,当连线阻抗不等时,输出的无功功率也不等,阻抗大的逆变器输出的无功功率较小,阻抗小者输出的无功功率较大。
B)等效输出阻抗为阻性时:Z∠θ=R
与输出阻抗为感性时分析类似,可得到等效输出阻抗为阻性时:不论各模块与负载间的连线阻抗是否相等,它们输出的无功功率都相同;而当连线阻抗不等时,各逆变器输出的有功功率各不相等。阻抗大者输出有功功率较小,阻抗小者输出无功功率较大。
4 PQ下垂系数调整法
这里只以等效输出阻抗呈感性时为例给出改善功率均分精度的方法。由式(6)可得Q受输出阻抗X和输出电压幅值E两者共同影响,因此可通过控制它们的大小对Q进行控制,而对E的调节可通过调整幅值下垂系数n来实现。
由前面分析逆变器输出感抗X越小者其输出的无功功率较大;反之输出的无功功率较小。又因为逆变器输出的无功功率随电压幅值的增大(减小)而增大(减小),因此若把无功功率较大逆变器的电压幅值下垂系数取大些,而无功功率小的逆变器的电压幅值系数取小些,就可以减小稳定时的输出无功功率误差。修正后的均流方程为:
 (10)
(10)
其中nk=n(1+KQ),k定义为幅值下垂系数自适应调整因子。
5 仿真与实验验证
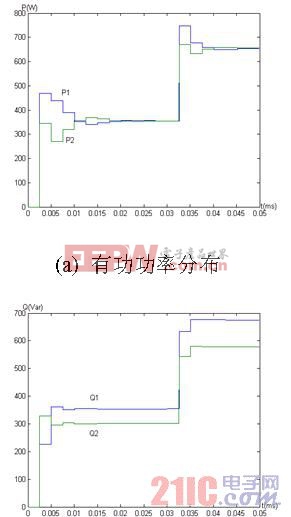
现通过Matlab软件仿真对并联逆变器输出感抗不等时功率分布情况的理论分析进行验证。为了观察到有功功率P和无功功率Q的动态调节过程,仿真时令模块1的初始频率为400.4Hz,初始电压值值为113.8V,输出感抗X1=0.7536Ω;模块2的初始频率为399.6Hz,初始电压值为115.3V,X2=0.88Ω,下垂方程式如下(i=1,2):
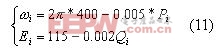
仿真过程中在30ms时刻感性负载(cosφ=0.75)从1000VA突加至2000VA,图5表明在输出感抗不等的情况下,通过下垂均流方法两逆变模块输出有功功率P可以均分,而无功功率Q无法均分,且无功功率差随着负载加重而变大。
(b) 无功功率分布
图5两逆变器输出感抗不一致时功率分布
为了减小无功功率偏差,现把下垂控制方程式(11)作如下修正:
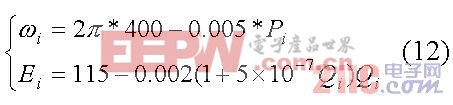
运用Matlab软件对并联系统进行仿真,初始条件和各参数设置与前面仿真相同。图6表明引入式(12)所示的控制方程后是可以减小线路感抗不平衡引起的无功偏差的,而且不影响有功功率的均分。
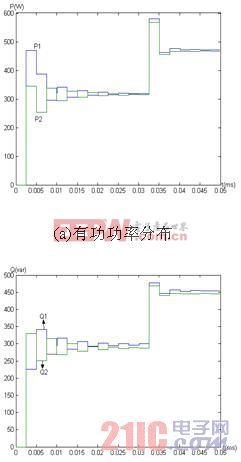
图6 引入修正方程后功率分布
在
- 具扩展频谱频率调制的低EMI DC/DC稳压器电路(12-24)
- EMI/EMC设计讲座(三)传导式EMI的测量技术(07-20)
- 扩展射频频谱分析仪可用范围的高阻抗FET探头(07-14)
- 开关电源基于补偿原理的无源共模干扰抑制技术(08-27)
- 开关电源的无源共模干扰抑制技术(11-12)
- 省电设计使DDS更适合便携应用(12-19)